
انواع مدهای کنترلی اینورتر درایو (کنترل دور موتور)

اگر با اینورتر کار کرده باشید، حتماً در منوی تنظیمات با عباراتی مثل V/F، Vector control، Torque mode یا Sensorless Vector برخورد کردهاید. این عبارات همان مد کنترلی اینورترهستند و انتخاب درست آنها میتواند یک سیستم پایدار، کممصرف و دقیق را به همراه داشته باشد. در این مقاله به زبان ساده و کاملاً کاربردی توضیح میدهیم که مد کنترلی اینورتر چیست، چه انواعی دارد، هر مد برای چه باری مناسب است و هنگام تنظیم آن چه نکاتی را باید رعایت کنید. هدف این است که بعد از خواندن متن، بتوانید با اطمینان مد مناسب را انتخاب و به درستی تنظیم کنید. با ما همراه باشید.
مد کنترلی اینورتر چیست؟
اینورتر وظیفه دارد ولتاژ و فرکانس سهفاز خروجی را طوری کنترل کند که سرعت، گشتاور یا موقعیت موتور مطابق نیاز تغییر کند.
مد کنترلی اینورتر در واقع روش و الگوریتمی است که درایو برای کنترل موتور از آن استفاده میکند. این مد تعیین میکند:
- اینورتر فقط نسبت V/F را ثابت نگه دارد یا مدل ریاضی موتور را هم در نظر بگیرد.( مدل ریاضی موتور یعنی درایو از روی جریان و ولتاژ حدس بزند؛ شار و گشتاور الان چقدر است تا بتواند خروجی را هوشمندتر تنظیم کند.)
- کنترل حلقه باز باشد یا حلقه بسته با فیدبک سرعت/موقعیت.
- هدف اصلی کنترل، سرعت باشد یا گشتاور یا حتی موقعیت.
به بیان ساده، وقتی مد کنترلی اینورتر را انتخاب میکنید، به درایو میگویید چطور فکر کند و بر اساس چه اطلاعاتی خروجی را تنظیم کند.
انواع مد کنترلی اینورتر در کاربردهای صنعتی
معمولا درایوهای صنعتی چند مد کنترلی مختلف دارند تا بتوانند انواع بارها و دقتهای موردنیاز را پوشش دهند. در ادامه مهمترین مدها را مرور میکنیم.
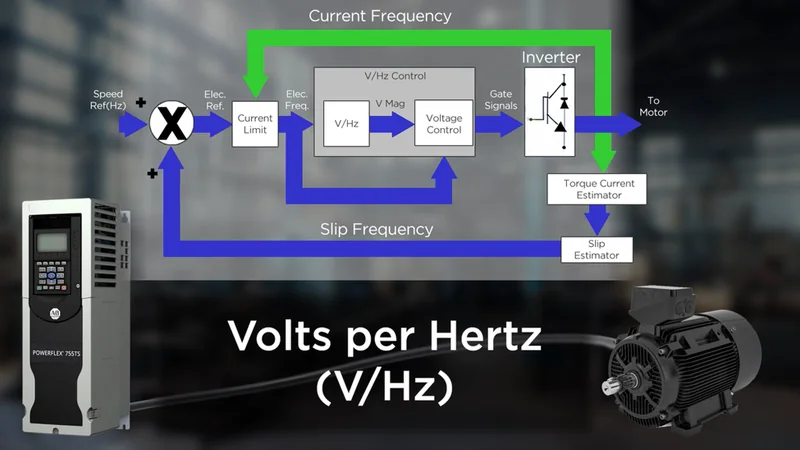
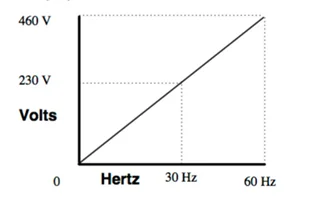
مد کنترل اسکالر (V/F) یا V/f Control
در این مد، اینورتر تلاش میکند نسبت ولتاژ به فرکانس موتور را ثابت نگه دارد. یعنی با افزایش فرکانس، ولتاژ را هم تقریباً متناسب بالا میبرد تا شار مغناطیسی موتور حفظ شود.
ویژگیها:
- کنترل به صورت حلقه باز است و اینورتر از سرعت واقعی موتور خبر ندارد.
- مدل ریاضی موتور وارد الگوریتم نمیشود؛ محاسبات سادهاند.
- برای بارهای گشتاور متغیر مثل فن و پمپ بسیار رایج است.
مزایا:
- راهاندازی سریع و ساده.
- نیاز نداشتن به انکودر یا فیدبک.
- مناسب برای بیشتر کاربردهای عمومی با دقت متوسط.
محدودیتها:
- دقت سرعت و گشتاور محدود است.
- در سرعتهای پایین، گشتاور موتور کاهش مییابد.
- برای بارهای اینرسی بالا یا کاربردهای دینامیک (تغییرات سریع سرعت) ایدهآل نیست.
اگر مثلاً یک پمپ سیرکولاسیون یا فن خنککننده دارید، در اکثر موارد مد کنترلی اینورتر از نوع V/F انتخاب کاملاً قابل قبولی است.
کنترل برداری بدون سنسور (Sensorless Vector Control)
در این مد، اینورتر با استفاده از مدل ریاضی موتور و اندازهگیری جریانها، شار و گشتاور را تخمین میزند و کنترل دقیقتری اعمال میکند؛ بدون اینکه انکودر نصب شده باشد.
ویژگیها:
- دقت گشتاور بالاتر نسبت به V/F.
- عملکرد بهتر در سرعتهای پایین.
- مناسب برای کاربردهایی با تغییرات بار سریع (مثلاً میکسر، نوار نقالههای سنگین).
مزایا:
- گشتاور راهاندازی بالاتر.
- کنترل پایدارتر در بارهای متغیر.
- عدم نیاز به انکودر در بسیاری از پروژهها.
محدودیتها:
- نیاز به تنظیم دقیق پارامترهای موتور و معمولاً اجرای Auto-tuning.
- پیچیدگی تنظیمات بیشتر از V/F است.
- در سرعتهای بسیار پایین و کاربردهای فوق دقیق، هنوز به دقت حلقه بسته با انکودر نمیرسد.
وقتی بار شما سنگین است، اینرسی بالایی دارد، یا نوسان در گشتاور برای شما قابل قبول نیست، بهتر است مد کنترلی اینورتر را روی Sensorless Vector (SVC) قرار بدهید.
کنترل برداری حلقه بسته (Closed-loop Vector Control)
در این مد، علاوه بر مدل موتور، از فیدبک انکودر هم استفاده میشود. یعنی اینورتر سرعت و موقعیت روتور را بهصورت واقعی اندازهگیری میکند.
ویژگیها:
- بالاترین دقت سرعت و گشتاور در بین مدهای رایج.
- امکان تولید گشتاور نامی حتی در سرعتهای بسیار پایین.
- مناسب برای کاربردهای حساس مثل جرثقیل، بالابر، وینچر، اکسترودر دقیق، ماشینهای بستهبندی.
مزایا:
- دقت بسیار بالا در کنترل سرعت.
- پاسخ دینامیکی عالی به تغییرات بار.
- امکان استفاده در کاربردهای شبهسروو.
محدودیتها:
- نیاز به انکودر، کابل انکودر و نصب مکانیکی مناسب آن.
- تنظیمات پیچیدهتر (پارامترهای انکودر، تست چرخش، اتوتیونینگ دقیق).
- هزینه بالاتر نسبت به مدهای دیگر.
هر زمان که ایمنی، دقت موقعیت یا کنترل گشتاور برای فرآیند شما حیاتی است، معمولاً انتخاب درست برای مد کنترلی اینورتر، حالت برداری حلقه بسته است.
مد کنترل گشتاور (Torque Control Mode)
در بعضی اینورترهای پیشرفته، علاوه بر کنترل سرعت، میتوانید گشتاور خروجی موتور را مستقیماً تنظیم کنید. در این حالت، مرجع اینورتر، مقدار گشتاور است و سرعت خودش بهطور طبیعی از تعامل گشتاور موتور و مقاومت بار بهوجود می اید. (جالبه نه؟)
کاربردهای رایج:
- وینچ ها و رول بازکن/جمعکن که نیاز به گشتاور ثابت روی قرقره دارند.
- کاربردهایی که محدود کردن گشتاوربرای حفاظت مکانیکی، مهم است.
در عمل، بسیاری از این کاربردها با ترکیبی از مد کنترلی اینورتر به صورت برداری + محدودیت گشتاور پیادهسازی میشوند.
مد کنترلی اینورتر به صورت برداری یعنی اینورتر رو گذاشتی روی یکی از این مودهایSensorless Vector یا Vector Control (با یا بدون انکودر) تو این حالت، کنترل اصلی هنوز بر اساس سرعت هست؛ یعنی: تو به درایو میگی: 30Hz، 40Hz، 50Hz و… و اینورتر سعی میکنه سرعت/فرکانس رو طبق اون مرجع نگه داره. پس تا اینجا مد کنترلی به صورت برداری یعنی کنترل برداری با مرجع سرعت.
حالا سوال اینه محدودیت گشتاور یعنی چی؟
تقریباً همه درایوهای درستوحسابی، چندتا پارامتر مثل Torque limit، Current limit و Overload limit را دارند. تو با این پارامترها به اینورتر میگی: حق نداری گشتاور (یا جریان) رو از این مقدار بیشتر کنی؛ اگر بار سنگین شد، زور الکی نزن! نتیجه این میشه که:
- اگر بار سبک باشد، اینورتر راحت به سرعت مرجع میرسد.
- اگر بار خیلی سنگین بشه، اینورتر تا جایی زور میزند که به حد گشتاور مجاز برسه، بعد یا سرعت را کم میکنه، یا خطا میده، یا دیگر بیشتر فشار نمیاره. (این بسته به تنظیمات داره).
حالا ترکیبی از مد برداری با محدودیت گشتاور یعنی مد کنترلی اینورتر را میگذاریم روی برداری (Vector / Sensorless Vector)، چون میخواهیم کنترل نرمتر و گشتاور بهتری داشته باشیم. مرجع اصلی همچنان سرعت است (مثلاً 30Hz ) و همزمان، یک سقف برای گشتاور/جریان تعریف میکنیم (مثلاً حداکثر 150% گشتاور نامی.). پس در واقع:
- اینورتر اصل کارش را به صورت برداری و با مرجع سرعت انجام میدهد،
- اما اجازه ندارد از یک حد مشخص گشتاور/جریان بالاتر برود.
این همان مفهوم ترکیب مد برداری با محدودیت در گشتاور است.
مدهای ویژه: PID داخلی، کنترل فشار و سطح
بسیاری از اینورترها علاوه بر مدهای فوق، یک کنترلکننده PID داخلی هم دارند که اجازه میدهد بدون PLC، فرآیندهایی مثل فشار، دما یا سطح را کنترل کنید. در این حالت:
- اینورتر از سنسور (مثلاً ترانسمیتر فشار 4–20mA) فیدبک میگیرد.
- خطای بین مقدار اندازهگیری شده و Setpoint را با PID پردازش میکند.
- خروجی PID، مرجع سرعت در مد کنترلی اینورتر (مثلاً V/F یا Vector) میشود.
این مد برای بوسترپمپ با فشار ثابت و سیستمهای تهویه بسیار کاربردی است و هزینه کنترل را کاهش میدهد.
چرا انتخاب صحیح مد کنترلی اینورتر مهم است؟
انتخاب درست مد کنترلی اینورتر فقط یک تنظیم نرمافزاری ساده نیست؛ مستقیماً روی چند عامل کلیدی اثر میگذارد:
- مصرف انرژی: مدهای نامناسب ممکن است موتور را بیجهت تحت فشار و تلفات بیشتر قرار دهند.
- طول عمر مکانیک: نوسان گشتاور و ضربههای مکانیکی، یاتاقانها و گیربکس را فرسوده میکنند.
- هزینه تجهیزات: ممکن است با انتخاب اشتباه، ناچار شوید انکودر، درایو بزرگتر یا تجهیزات جانبی اضافه کنید.
برای مثال:
- یک فن بزرگ در سیستم تهویه معمولاً با مد V/F کاملاً خوب کار میکند و نیازی به مد برداری ندارد.
- یک جرثقیل با بار متغیر و لحظات حساس در توقف/راهاندازی، در مد V/F ناپایدار و خطرناک میشود و به کنترل برداری حلقه بسته نیاز دارد.
- یک بوسترپمپ با فشار ثابت با استفاده از PID داخلی اینورتر و مد کنترلی مناسب، هم در مصرف انرژی صرفهجویی میکند و هم فشار شبکه را پایدار نگه میدارد.
نکات کلیدی و عملی در انتخاب و تنظیم مد کنترلی اینورتر
در ادامه چند گام عملی برای انتخاب و تنظیم صحیح مد کنترلی اینورتر مطرح میشود.
1. نوع بار را دقیقا مشخص کنید.
اول باید بدانید بار شما از کدام نوع است:
- بار گشتاور متغیر (فن و پمپ): گشتاور متناسب با مربع سرعت است. مد V/F یا مد کنترلی برداری معمولاً کافی است.
- بار گشتاور ثابت (نوار نقاله، اکسترودر، میکسر): در کل محدوده سرعت تقریباً به گشتاور یکسان نیاز دارند؛مد کنترلی برداری مناسبتر است.
- بار اینرسی بالا (سانتریفیوژ): مد برداری با تنظیمات دقیقِ شتاب/ترمز و محدودیت گشتاور لازم است.
- بار حساس به سرعت یا موقعیت (بالابر، وینچ، ماشین بستهبندی): غالباً به مد برداری حلقه بسته با انکودر نیاز دارند.
هرچه بار بحرانیتر و حساستر باشد، نیاز به مدهای کنترلی پیشرفتهتر بیشتر است.
2. سطح دقت مورد نیاز را مشخص کنید.
از خودتان بپرسید اگر سرعت موتور 2–3Hz جابهجا شود، مشکلی پیش میآید؟ یا نوسان فشار یا سرعت تا چه حد برای فرآیند قابل قبول است؟
اگر مقدار کمی نوسان پذیرفتنی است، معمولاً مد V/F یا Sensorless Vector کفایت میکند ولی اگر فرآیند به سرعت و موقعیت بسیار دقیق وابسته است، مد کنترلی اینورتر باید برداری حلقه بسته باشد.
3. در صورت نیاز، فیدبک سرعت (انکودر) را در نظر بگیرید.
انکودر همیشه لازم نیست. اما در شرایط زیر تقریباً اجتنابناپذیر است:
- توقف و نگهداشتن بار سنگین روی شیب (بالابر، آسانسور صنعتی).
- همسرعت کردن چند محور با دقت بالا.
- کاربردهای شبهسروو که نیاز به تکرارپذیری دقیق دارند.
اگر انکودر نصب میکنید، حتماً، نوع آن (ABZ، انکودر نوری، مغناطیسی، افزایشی/مطلق) را با دفترچه راهنمای اینورتر خودتان تطبیق دهید. از کابل شیلدداراستفاده کنید و سیمبندی را صحیح انجام دهید.
4. تنظیم پارامترهای موتور و اجرای Auto-tuning
هر مد کنترلی اینورتر بدون داشتن اطلاعات صحیح از موتور، نمیتواند خوب کار کند. حداقل پارامترهای زیر باید دقیق وارد شوند:
- ولتاژ نامی موتور
- جریان نامی
- توان نامی
- فرکانس نامی
- تعداد قطب (یا سرعت نامی روی پلاک)
در مدهای برداری، اجرای Auto-tuning بسیار مهم است. اتوتیونینگ کمک میکند درایو مقاومت، اندوکتانس و سایر پارامترهای موتور را تخمین بزند و مدل ریاضی بهتری بسازد. نتیجه آن:
- گشتاور یکنواختتر
- پاسخ سریعتر به تغییرات بار
- دقت بالاتر در سرعتهای پایین
5. تست عملی و تنظیم جزئیات
بعد از انتخاب مد کنترلی اینورتر و وارد کردن پارامترها، حتماً یک تست عملی انجام دهید:
- موتور را بدون بار و سپس با بار واقعی راهاندازی کنید.
- به رفتار موتور هنگام شتابگیری، ترمز و تغییر ناگهانی بار توجه کنید.
- در صورت نیاز، پارامترهای شتاب/ترمز، محدودیت جریان، محدودیت گشتاور و ضرایب PID داخلی را اصلاح کنید.
در بسیاری از اینورترها، دو مجموعه پارامتر کنترلی برای سرعتهای پایین و بالا تعریف میشود تا در کل محدوده سرعت، رفتار پایدار بماند.
جمعبندی و توصیههای عملی
مد کنترلی اینورتر در واقع مغز کنترلی درایو است و تعیین میکند اینورتر چطور به بار پاسخ دهد. برای فن و پمپ، معمولاً مد V/F یا Sensorless Vector کافی است و پیچیدگی اضافه ایجاد نمیکند. برای نوار نقالههای سنگین، اکسترودر، میکسر و بارهای اینرسی بالا، مد برداری بدون سنسور انتخاب مطمئنتری است. برای جرثقیل، بالابر، سیستمهای حساس به ایمنی و کاربردهای دقیق، بهطور معمول به مد برداری حلقه بسته با انکودر نیاز دارید. همیشه قبل از راهاندازی، اطلاعات پلاک موتور را دقیق وارد کنید، Auto-tuning را اجرا کنید و بعد با تست عملی، تنظیمات را اصلاح کنید.
اگر این چند اصل ساده را رعایت کنید، انتخاب و تنظیم مد کنترلی اینورتر دیگر یک کار حدسی و بر پایه سعی و خطا نیست، بلکه یک تصمیم مهندسی مبتنی بر تحلیل بار و نیاز فرآیندتان خواهد بود.
پرسشهای متداول درباره مد کنترلی اینورتر
۱) مد کنترلی اینورتر دقیقاً یعنی چه؟
مد کنترلی اینورتر روشی است که درایو با استفاده از آن ولتاژ و فرکانس را تنظیم میکند تا سرعت یا گشتاور موتور مطابق نیاز کنترل شود. این مد میتواند ساده (V/F) یا پیچیدهتر (برداری، گشتاور، حلقهبسته) باشد.
۲) برای پمپ و فن ساده کدام مد کنترلی مناسب است؟
در اغلب موارد، مد V/F یا Sensorless Vector بهترین انتخاب است. V/F تنظیم سادهتری دارد و برای بیشتر بوسترپمپها و فنها پاسخگو است؛ اگر بار متغیر یا حساستر است، مد برداریِ بدون سنسور عملکرد نرمتر و پایدارتر ارائه میدهد.
۳) چه زمانی باید از انکودر و مد برداری حلقهبسته استفاده کنم؟
وقتی دقت سرعت بسیار مهم است، بار روی شیب باید نگه داشته شود، یا ایمنی سیستم حیاتی است (مثل جرثقیل، بالابر، وینچ)، بهتر است مد کنترلی را روی برداریِ حلقهبسته قرار دهید و از انکودر استفاده کنید.
۴) اگر مد کنترلی اینورتر را اشتباه انتخاب کنم چه اتفاقی میافتد؟
معمولاً سیستم کار میکند، اما با مشکلاتی مثل نوسان سرعت، افت گشتاور در سرعتهای پایین، اضافهجریان یا استهلاک مکانیکی مواجه میشوید. در کاربردهای حساس، انتخاب نادرست حتی میتواند باعث توقف ناگهانی یا رفتار خطرناک سیستم شود.
۵) آیا همیشه لازم است Auto-tuning انجام شود؟
در مد V/F ساده، بدون اتوتیونینگ هم میتوان کار کرد؛ اما در مدهای برداری (خصوصاً Sensorless و حلقهبسته) اجرای Auto-tuning شدیداً توصیه میشود تا مدل موتور دقیقتر شود و اینورتر با حداکثر توان و دقت کار کند.
۶) از کجا بفهمم تنظیمات مد کنترلی اینورتر من درست است؟
نشانههای صحت تنظیمات: راهاندازی نرم بدون ضربه، نبودِ نوسان شدید در سرعت یا فشار، عدم بروز مکرر آلارم اضافهجریان/اضافهبار، و رفتار پایدار در تغییر بار. در صورت مشاهدهٔ مشکل، انتخاب مد، پارامترهای موتور و نتیجهٔ اتوتیونینگ را بازبینی کنید.