
همه چیز درباره انکودر و اتصال آن به اینورتر
میدانیم که انکودر برای فیدبک سرعت و موقعیت استفاده میشود. در این مقاله، به صورت مرحله به مرحله توضیح میدهیم که انکودر چیست، چرا و چگونه به اینورتر متصل میشود، چه نکات فنی باید رعایت شود و در چه کاربردهایی از انکودر استفاده میکنیم. شما بعد از خواندن این مطلب درک روشنی از مفهوم انکودر و اتصال آن به اینورتر پیدا کرده، به راحتی میتوانید نصب و راه اندازی انکودر به اینورتر را انجام داده و در پروژه هایتان از آن استفاده کنید.
انکودر و انواع آن چیست؟
انکودر یک سنسور موقعیت و سرعت است که حرکت مکانیکی (معمولاً دوران شفت موتور) را به سیگنال الکتریکی تبدیل میکند. این سیگنال معمولاً به صورت پالسهای دیجیتال است و توسط PLC ، اینورتر یا Servo Drive برای:
- اندازه گیری سرعت
- تشخیص جهت حرکت
- شمارش تعداد دور
- کنترل موقعیت (Position)
استفاده میشود.
ارتباط انکودر با اینورتر
ارتباط انکودر و اینورتر به این شکل است که خروجی انکودر به ورودی فیدبک اینورتر وصل شود تا درایو بتواند:
- سرعت واقعی موتور را بخواند،
- خطای بین سرعت تنظیمشده و سرعت واقعی را تشخیص داده و تصحیح کند،
- و در صورت نیاز، کنترل حلقه بسته را برای سرعت یا حتی گشتاور پیادهسازی کند.( در این روش، بهجای کنترل (V/F) بدون فیدبک، وارد دنیای کنترل حلقه بسته (Closed-loop Vector Control) میشویم.)
چرا انکودر را به اینورتر متصل میکنیم؟
ما برای رسیدن به دقت بالاتر در کنترل سرعت، ترمز سریع در کاربردهایی که نیاز به پاسخ سریع دارند، شمارش و کنترل دقیق موقعیت از انکدرها همراه با درایو استفاده میکنیم. در ادامه به تفصیل درباره این موارد صحبت میکنیم.
دقت بالاتر در کنترل سرعت
در کنترل باز (بدون انکودر)، اینورتر فرض میکند که سرعت موتور متناسب با فرکانس خروجی است؛ اما در عمل، لغزش موتور القایی، تغییر بار و تغییرات ولتاژ باعث ایجاد خطا میشوند.
اما وقتی انکودر به اینورتر وصل میشود:
- درایو سرعت واقعی را میسنجد؛
- با استفاده از الگوریتم کنترلی (PID و…)، خروجی را تصحیح میکند؛
در نهایت سرعت تنظیمشده با سرعت واقعی تقریباً برابر میشود، حتی در بارهای متغیر.
پاسخ دینامیکی بهتر (Start/Stop و ترمز سریعتر)
در کاربردهایی مانند جرثقیل و لیفتینگ، رولینگ، آسانسور، بالابر و … دقت و سرعت عکسالعمل سیستم خیلی مهم است. فیدبک انکودر به اینورتر این امکان را میدهد که شتاب و ترمز را بهتر کنترل کرده و در لحظاتی که بار تغییر میکند، افت سرعت را جبران کند.
امکان شمارش دقیق و کنترل موقعیت نسبی
در بعضی موارد سرعت دقیق هدف ما نیست اما دقت در شمارش تعداد دور، طول جابجایی یا مقدار برش و…اهمیت دارد. در چنین مواردی، اتصال انکودر به اینورتر یا PLC باعث میشود بتوانیم:
- طول نوار یا ورق را دقیق اندازهگیری کنیم؛
- بتوانیم در نقطه مشخص، موتور را Stop یا Reverse کنیم؛
- عملیات برش، پانچ یا چاپ را در موقعیتی درست و دقیق انجام دهیم.
انواع انکودر مناسب برای اتصال به اینورتر
انکودرها به دو نوع افزایشی و مطلق تقسیم میشوند. در این بخش انواع انکدر را بررسی کرده و ویژگی های هر کدام را بررسی میکنیم.
انکودر افزایشی (Incremental Encoder)
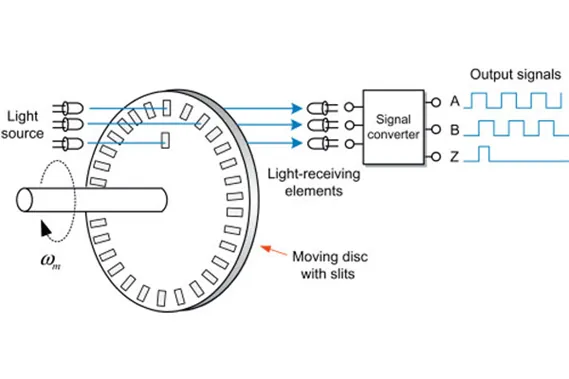
متداولترین نوع انکودر انکودر افزایشی است. در انکودر افزایشی به ازای چرخش، انکودر سیگنال و پالس را به کنترلر ارسال کرده و به میزان این پالسها در زمان، میزان سرعت و جابهجایی، محاسبه میشود. خروجی آن معمولاً شامل سیگنالهای Aو B (برای پالس دادن و تشخیص جهت) و Z برای پالس رفرنس در هر دور) است.
اینورترهای صنعتی معمولاً انکودر افزایشی را پشتیبانی میکنند و از روی تعداد پالس در واحد زمان، سرعت و موقعیت نسبی را بهدست میآورند.
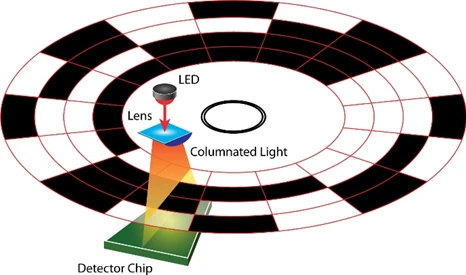
انکودر مطلق (Absolute Encoder)
در انکودرهای مطلق، هر موقعیت زاویهای دارای یک کد باینری منحصربهفرد است که تکرار نمیشود. این کد میتواند به صورت باینری ساده یا BCDباشد و زاویه انکودر را در بازه 0 تا 360 درجه نمایش میدهد. طول رشته کد باینری به تعداد سنسورهای فرستنده/گیرنده و تعداد لایههای دیسک انکودر بستگی دارد، پس با افزایش تعداد بیتها، دقت موقعیت نیز بالاتر میرود. بنابراین جایی از انکودر مطلق استفاده میکنیم که بعد از قطع برق، سیستم مجبور نباشد دوباره از نقطه شروع حرکت کند تا موقعیتش رو پیدا کند. این نوع انکودر بیشتر در سروو و سیستمهای موقعیتیابی دقیق استفاده میشود.
امروزه رایجترین روش انتقال داده در انکودرهای مطلق استفاده از خروجیهای سریال یا شبکههای صنعتی است. این پروتکلها با کابلکشی سادهتر و دقت بالاتر، جایگزین موازی شدهاند. مهمترین پروتکلهای ارتباطی عبارتند از:
- SSI (Synchronous Serial Interface): پرکاربردترین پروتکل برای انکودرهای مطلق، مقاوم در برابر نویز و ساده در راهاندازی.
- BiSS (Bidirectional SSI): نسخه پیشرفته SSI، با سرعت بالاتر و قابلیت تبادل دوطرفه داده.
- EnDat (Heidenhain): پروتکل اختصاصی با دقت بالا، همراه با امکانات تست سلامت داده.
برخی اینورترهای پیشرفته کارت انکودر مطلق (مثلاً SSI، EnDat، BISS) را هم پشتیبانی میکنند، اما در عموم پروژهها، انکودر افزایشی رایجتر است.
نحوه سیمبندی انکودر با اینورتر چگونه است؟
در این بخش سعی میکنیم یک الگوی کلی برای پروژههای صنعتی ارائه کنیم. جزئیات دقیق ترمینالها و پارامترها همیشه باید از روی منوال اینورتر و دیتاشیت انکودر چک شود.

بررسی سازگاری انکودر و اینورتر
قبل از هر سیمبندی، باید به چند سوال کلیدی جواب بدهیم:
اینورتر ورودی انکودر دارد یا نیاز به کارت آپشن (Encoder Card) است؟
نوع ورودی اینورتر چیست؟
- Line Driver (RS422)
- Open Collector (NPN/PNP)
- Push-Pull
ولتاژ تغذیه انکودر چقدر است؟
5V یا 12V یا 24V
حداکثر فرکانس ورودی اینورتر چقدر است و آیا با رزولوشن انکودر سازگار است؟
اگر این موارد را چک نکنیم، ممکن است، انکودر درست تغذیه نشود، پالسها به خاطر عدم تطابق سطح ولتاژ قابلتشخیص نباشند و یا در سرعتهای بالا، اینورتر پالسها را از دست بدهد.
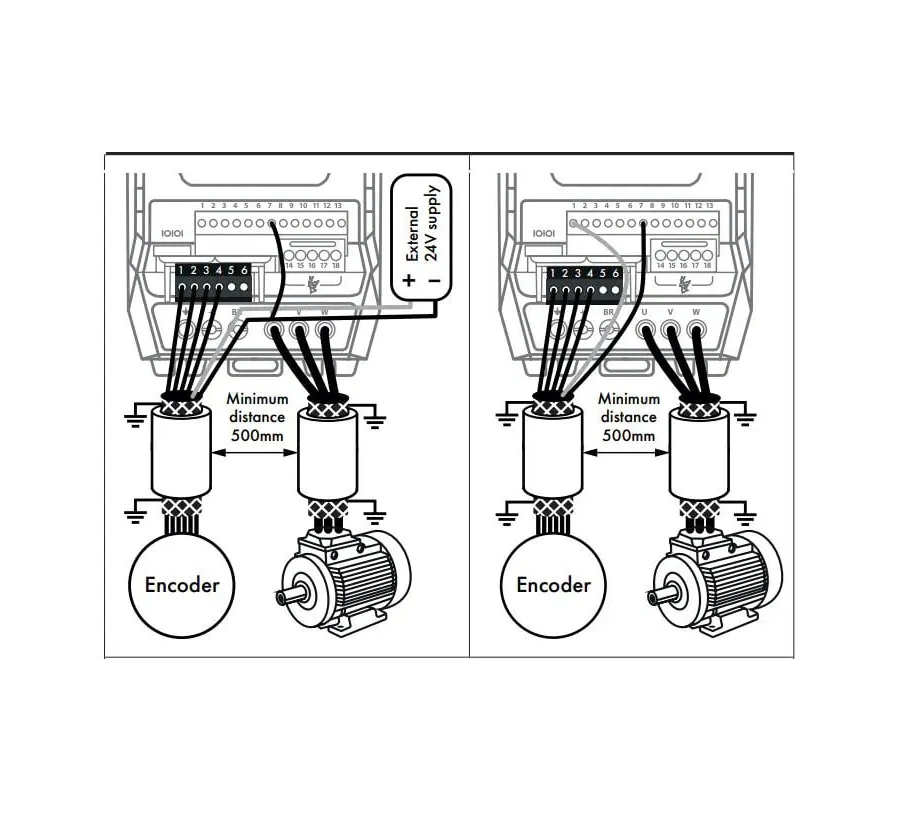
سیمبندی تغذیه و سیگنال انکودر
بهصورت کلی مراحل زیر برای اتصال تغذیه و سیگنال انکودر انجام میشود:
- از ترمینالهای +V و0V در اینورتر (یا منبع تغذیه جداگانه) برای تغذیه انکودر استفاده میشود؛
- سیگنالهای A و B (و در صورت استفاده Z) به ترمینالهای ورودی انکودر اینورتر وصل میشوند؛
- اگر انکودر Line Driver است، جفت تفاضلی A+/A−، B+/B− و Z+/Z− طبق توصیه منوال وصل میشوند؛
- شیلد کابل انکودر معمولاً از سمت اینورتر (یا تابلو) به زمین متصل و سمت دیگر آزاد گذاشته میشود.
نکته مهم: کابل انکودر باید زوج تابیده (Twisted Pair) و شیلددار باشد و طول آن در محدوده توصیهشده منوال (مثلاً 20–50 متر بسته به نوع سیگنال و فرکانس) رعایت شود.
تنظیم پارامترهای اینورتر برای کار با انکودر
بعد از اینکه سیم بندی اینورتر و انکودر انجام شد، نوبت به تنظیم پارامترها میرسد. بسته به برند و مدل اینورتر، نام پارامترها فرق میکند، اما مفهوم کلی تقریباً مشابه است:
- فعال کردن مد کنترل حلقه بسته (Closed-loop Vector Control / Speed Control with Encoder)
- تعریف نوع انکودر (Incremental، تعداد کانالها، نوع ورودی سیگنال)
- وارد کردن رزولوشن انکودر (مثلاً 1024ppr، 1048ppr و…)
- تنظیم فیلتر نرمافزاری برای سرعت (Speed Filter) در صورت نیاز
- انجام Auto-tuning یا شناسایی موتور (Motor Identification)
- تنظیم پارامترهای PID (در صورت استفاده از آن)
بعد از این مراحل، میتوانید با یک تست ساده: Setpoint سرعت را تنظیم کنید، سرعت واقعی را روی نمایشگر اینورتر ببینید،همچنین می توانید ببینید که چقدر خطا کاهش پیدا کرده است.
جمع بندی و راهنمای خرید
استفاده از فیدبک انکودر برای همه پروژهها ضروری نیست. در بسیاری از کاربردهای پمپ و فن ساده، کنترل V/F بدون انکودر کافی است. اما درمواقعی که نیاز به سرعت بالا و ثابت در بار متغیر داریم، یا درکاربردهایی مانند لیفتینگ، جرثقیل، آسانسور، بالابر،ماشینآلات بستهبندی، لبلینگ، برش و به طور کلی در پروژههایی که در آن کیفیت و دقت محصول به سرعت شفت موتور وابسته است، استفاده از انکودر کیفیت و دقت لازم را به ما میدهد. پس اگر ما یک فن را بخواهیم با اینورتر کنترل کنیم، نیازی به انکودر نیست اما اگر پروژه ای داریم که داشتن سرعت دقیق اهمیت زیادی دارد باید از انکودر استفاده کنیم.
برای خرید انکودر، اینورتر و دیگر تجهیزات اتوماسیون صنعتی میتوانید به سایت تتا صنعت مراجعه کرده و یا با شماره 09922629425 از طریق پیام رسانهایی مانند تلگرام، واتساپ و… با کارشناسان فنی در ارتباط باشید. همچنین میتوانید با شماره ۰۲۱-۹۱۰۹۱۰۲۲ تماس بگیرید تا از مشاوره رایگان کارشناسان فنی ما بهرهمند شوید و خریدی هوشمندانه داشته باشید.
پرسشهای متداول درباره انکودر به اینورتر
سؤال 1: آیا برای همه اینورترها میتوان انکودر نصب کرد؟
خیر. فقط اینورترهایی که ورودی انکودر یا کارت انکودر آپشن دارند میتوانند مستقیماً فیدبک انکودر را بخوانند. در اینورترهای ساده معمولاً چنین امکانی وجود ندارد و در صورت نیاز باید فیدبک انکودر را به PLC یا کنترلر جداگانه داد.
سؤال 2: برای اتصال انکودر به اینورتر، کدام نوع انکودر را استفاده کنیم؟
در اغلب پروژههای صنعتی، انکودر افزایشی (Incremental) استانداردترین گزینه است و تقریباً همهٔ اینورترهای دارای ورودی انکودر آن را پشتیبانی میکنند. انکودرهای مطلق (Absolute) بیشتر در سروو سیستمها و سیستمهای موقعیتیابی دقیق استفاده میشوند؛ مگر اینکه اینورتر بهطور خاص از پروتکل آنها پشتیبانی کند.
سؤال 3: طول کابل انکودر تا اینورتر چقدر میتواند باشد؟
طول مجاز بستگی به نوع سیگنال (Open Collector، Line Driver)، کیفیت کابل، فرکانس پالسها و توصیهٔ سازنده دارد؛ اما معمولاً برای کابلهای شیلددار و انکودر Line Driver تا چند ده متر (مثلاً 20–50m) قابلقبول است. در هر صورت به منوال اینورتر و انکودر مراجعه کنید.
سؤال 4: اگر انکودر نویز بگیرد چه علائمی دیده میشود؟
نویز روی سیگنال انکودر میتواند باعث پرش سرعت روی نمایشگر اینورتر، خطاهای Overspeed / Encoder Fault، توقفهای ناگهانی یا رفتار نامتعادل شفت شود. معمولاً با کابل شیلددار، زمینکردن صحیح شیلد، فاصلهٔ مناسب از کابلهای قدرت و تنظیم فیلتر نرمافزاری میتوان مشکل را کاهش داد.
سؤال 5: آیا میتوان از انکودر همزمان برای اینورتر و PLC استفاده کرد؟
در بسیاری از سیستمها خروجی انکودر فقط به اینورتر وصل میشود و اینورتر سرعت یا موقعیت را تحت پروتکلهای فیلدباس (مانند PROFIBUS، Modbus و…) به PLC ارائه میدهد. در بعضی موارد از انکودر چندخروجی یا انکودر معمولی بههمراه بافر استفاده میشود تا هر دو تجهیز (اینورتر و PLC) پالسها را جداگانه دریافت کنند.
سؤال 6: در چه کاربردهایی نیازی به انکودر نیست؟
در کاربردهایی مانند فن، پمپ ساده، دمندهها و سیستمهای تهویه که کمی تغییر سرعت و خطای درصدی مسئلهساز نیست، معمولاً کنترل V/F بدون انکودر کافی است و هزینه و پیچیدگی اتصال انکودر توجیهی ندارد.