
موتور آسنکرون چیست
یکی از پرکاربردترین موتورهای الکتریکی که در بسیاری از صنایع کاربرد دارد، موتور آسنکرون است، درموتور آ سنکرون سرعت چرخش آن کمتر از سرعت میدان مغناطیسی دوار استاتور است. با توجه به اینکه میدان مغناطیسی استاتور باعث ایجاد یک جریان القایی و در نتیجه چرخش روتور میشود، به این الکتروموتور، موتور القایی هم گفته میشود. در این مقاله یاد میگیریم که موتور آسنکرون چیست و با ساختار و کاربرد و نحوه راه اندازی آن آشنا میشویم.
انواع موتور های آسنکرون
به طور کلی موتورهای آسنکرون بر اساس نوع روتور به دو دسته تقسیم میشوند:
- موتورهای آسنکرون با روتور قفس سنجابی
- موتورهای آسنکرون با روتور سیم پیچی شده یا اسلیپ رینگ
موتور آسنکرون با روتور قفس سنجابی
 روتور قفس سنجابی یک نوع موتور الکتریکی است که در آن، روتور استوانهای شکل و متشکل از میلههای رسانا (معمولاً آلومینیومی یا مسی) است که در شیارهای استاتور قرار گرفته و به صورت الکتریکی به هم متصل شدهاند، به طوری که شبیه به قفس سنجاب به نظر میرسد. تفاوت اصلی آن با موتور این است که در موتور سنکرون، روتور با سرعت میدان مغناطیسی دوار استاتور همگام میشود و سرعت چرخش روتور همگام با فرکانس برق ورودی است.
روتور قفس سنجابی یک نوع موتور الکتریکی است که در آن، روتور استوانهای شکل و متشکل از میلههای رسانا (معمولاً آلومینیومی یا مسی) است که در شیارهای استاتور قرار گرفته و به صورت الکتریکی به هم متصل شدهاند، به طوری که شبیه به قفس سنجاب به نظر میرسد. تفاوت اصلی آن با موتور این است که در موتور سنکرون، روتور با سرعت میدان مغناطیسی دوار استاتور همگام میشود و سرعت چرخش روتور همگام با فرکانس برق ورودی است.
ساختار
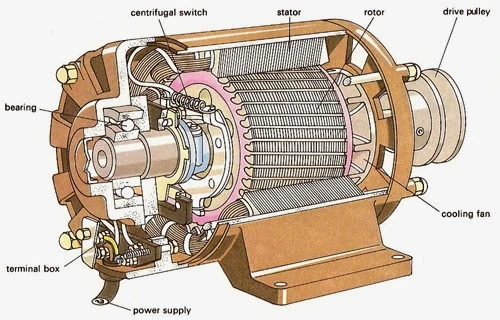
این موتور از دو بخش اصلی تشکیل شده است:
- استاتور (بخش ثابت): شامل مجموعهای از ورقهای فولادی با شیارها و سیمپیچیهای سهفاز است که با اتصال به منبع برق متناوب، یک میدان مغناطیسی دوار (میدان گردان) تولید میکند.
- روتور (بخش دوار): ساختاری شبیه به “قفس سنجاب” دارد. این بخش از میلههای رسانای (معمولاً آلومینیومی یا مسی) موازی تشکیل شده است که در دو انتها توسط حلقههای اتصال کوتاه به هم وصل شدهاند. در این نوع روتور، سیمپیچی خارجی وجود ندارد و جریان مورد نیاز روتور از طریق القای الکترومغناطیسی تأمین میشود.
نحوه کار
- هنگامی که جریان متناوب سهفاز به سیمپیچیهای استاتور اعمال میشود، یک میدان مغناطیسی دوار با سرعت سنکرون (Ns) ایجاد میگردد. این میدان دوار از میلههای رسانای روتور عبور کرده و طبق قانون القای الکترومغناطیسی فارادی، در آنها جریان الکتریکی القا میکند. این جریانهای القایی نیز به نوبه خود میدان مغناطیسی خود را تولید میکنند.
- برهمکنش بین میدان مغناطیسی استاتور و روتور، نیرویی (گشتاور) تولید میکند که باعث چرخش روتور در جهت میدان دوار میشود. از آنجایی که این یک موتور آسنکرون است، سرعت چرخش روتور (N) همیشه کمتر از سرعت میدان مغناطیسی استاتور (Ns) است (N < Ns)؛ این اختلاف سرعت برای ادامه فرآیند القا ضروری است.
برای اطلاع بیشتر در مورد موتور سنکرون پیشنهاد میکنیم، مقاله “موتور سنکرون چیست” را مطالعه کنید.
مزایا و معایب
مزایا:
- ساختار ساده و مستحکم: به دلیل عدم وجود قطعات متحرک پیچیده مانند جاروبک یا حلقههای لغزان، ساختار آن بسیار ساده است.
- قابلیت اطمینان بالا: نیاز به نگهداری و تعمیرات کمی دارد.
- هزینه اولیه پایین: تولید انبوه و طراحی ساده باعث کاهش هزینه آن شده است.
- راندمان مناسب: در حالت کار عادی، راندمان خوبی دارد.
معایب:
- جریان هجومی بالا در زمان راهاندازی: در لحظه شروع به کار، جریان زیادی (۳ تا ۷ برابر جریان نامی) از شبکه میکشد.
- گشتاور راهاندازی پایین: در مقایسه با موتورهای روتور سیمپیچیشده، گشتاور شروع کمتری دارد.
- عدم قابلیت تنظیم سرعت: تنظیم دور موتور در این نوع موتورها به آسانی امکانپذیر نیست (مگر با استفاده از تجهیزات جانبی مانند درایو فرکانس متغیر).
کاربردها
- این موتورها در طیف وسیعی از کاربردهای صنعتی و خانگی استفاده میشوند، از جمله: پمپها، فنها، کمپرسورها، نوار نقالهها، ماشینآلات صنعتی، و تقریباً هر جایی که نیاز به یک منبع قدرت مکانیکی با سرعت ثابت و مطمئن باشد.
موتورهای آسنکرون با روتور سیم پیچی شده یا اسلیپ رینگ
موتور آسنکرون با روتور سیم پیچی شده (اسلیپ رینگ) چیست ؟ نوعی الکتروموتور است که در آن به جای قفسه، روتور دارای سیم پیچ است و انتهای این سیم پیچها به حلقههای لغزنده (اسلیپ رینگ) متصل میشوند. این طراحی به کاربر اجازه میدهد تا با اضافه کردن مقاومت خارجی به مدار روتور، کنترل بیشتری بر روی گشتاور راهاندازی و سرعت موتور داشته باشد. این موتورها گشتاور راهاندازی بالا و قابلیت کنترل سرعت بهتری نسبت به موتورهای با روتور قفسهای ارائه میدهند.
ساختار و عملکرد
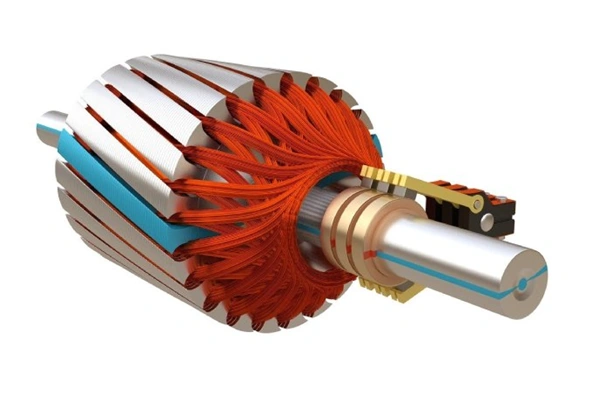
- روتور سیم پیچی شده: به جای میلههای مسی مانند موتورهای با روتور قفسهای، روتور از سیمپیچهای سه فاز تشکیل شده است که انتهای آنها به حلقههای لغزنده متصل میشود.
- حلقههای لغزنده (اسلیپ رینگ): این حلقهها به صورت دورانی به روتور متصل هستند و جریان را از طریق جاروبکها به مدار خارجی منتقل میکنند.
- کنترل خارجی: با اتصال بانکهای مقاومتی به اسلیپ رینگها، میتوان مقاومت روتور را افزایش داد. این کار باعث افزایش گشتاور راهاندازی و کاهش جریان راهاندازی میشود.
- کنترل سرعت و گشتاور: با تغییر مقدار مقاومت خارجی، میتوان سرعت موتور را تا حدی در محدوده خاصی کنترل کرد و گشتاور مناسب را برای کاربردهای مختلف تنظیم نمود.
مزایا
- به دلیل امکان افزودن مقاومت خارجی کنترلشده به مدار روتور در زمان راهاندازی.
- جریان راهاندازی پایین: به دلیل اضافه شدن مقاومت خارجی در زمان راهاندازی، جریان اولیه کمتری نسبت به موتورهای روتور قفسهای دارد.
- کنترل سرعت: امکان کنترل سرعت موتور در محدوده مشخصی وجود دارد که برای کاربردهایی که نیاز به تنظیم سرعت دارند، مفید است.
معایب
- هزینه بالاتر: پیچیدگی ساختار سیمپیچی و وجود اسلیپ رینگها باعث میشود هزینه اولیه این موتورها بیشتر باشد.
- نگهداری بیشتر: قطعاتی مانند جاروبکها و اسلیپ رینگها ممکن است نیاز به تعمیر و نگهداری داشته باشند و در معرض سایش قرار دارند.
کاربردها
موتورهای اسلیپ رینگ در کاربردهایی که نیاز به گشتاور راهاندازی بالا یا کنترل سرعت اولیه وجود دارد، استفاده میشوند، از جمله:
- جرثقیلها و بالابرها
- پمپهای بزرگ و فنها
- پرسهای صنعتی
- سنگشکنها
امروزه با پیشرفت فناوری درایوهای فرکانس متغیر (اینورترها)، بسیاری از نیازهای مربوط به کنترل سرعت و کاهش جریان راهاندازی توسط موتورهای قفس سنجابی استاندارد و اینورترها برطرف میشود، که باعث کاهش استفاده از موتورهای اسلیپ رینگ در برخی کاربردها شده است.
روش های راه اندازی موتور آسنکرون چیست
برای راهاندازی موتورهای آسنکرون (القایی)، به دلیل ماهیت الکتریکی آنها و نیاز به غلبه بر اینرسی بار، روشهای مختلفی وجود دارد. انتخاب روش مناسب به نوع موتور (روتور قفسی یا اسلیپ رینگ)، اندازه موتور، نوع بار و محدودیتهای شبکه برق بستگی دارد.
هدف اصلی از روشهای راهاندازی، مدیریت دو چالش اساسی است:
- جریان هجومی (Inrush Current) بالا: در لحظه راهاندازی، موتور جریان بسیار زیادی (چندین برابر جریان نامی) از شبکه میکشد.
- گشتاور راهاندازی مناسب: ایجاد گشتاور کافی برای چرخاندن بار متصل به موتور از حالت سکون.
در ادامه، روشهای اصلی راهاندازی موتورهای آسنکرون (به ویژه نوع قفس سنجابی که رایجتر است) توضیح داده شده است:
روشهای راهاندازی موتور آسنکرون
1. راهاندازی مستقیم (Direct Online – DOL)
این سادهترین و رایجترین روش راهاندازی است. در این روش، موتور مستقیماً به ولتاژ کامل شبکه متصل میشود.
- مزایا: سادگی مدار کنترلی، هزینه پایین، گشتاور راهاندازی بالا.
- معایب: جریان هجومی بسیار بالا (ممکن است باعث افت ولتاژ در شبکه شود و به بارهای دیگر آسیب بزند)، شوک مکانیکی به بار.
- کاربرد: موتورهای کوچک (معمولاً زیر 5 اسب بخار یا در مواردی که ظرفیت شبکه اجازه دهد).
.2راهاندازی ستاره-مثلث (Star-Delta Starting)
این روش یکی از پرکاربردترین روشها برای موتورهای با توان متوسط و بزرگ است. هدف آن کاهش ولتاژ اعمالی به سیمپیچها در لحظه راهاندازی است.
- نحوه کار: موتور در ابتدا به صورت اتصال “ستاره” راهاندازی میشود که در این حالت، ولتاژ اعمال شده به هر سیمپیچ ولتاژ خط کامل است. پس از رسیدن موتور به حدود 75 تا 80 درصد سرعت نامی، اتصال به صورت خودکار به حالت “مثلث” تغییر میکند و موتور با ولتاژ کامل کار میکند.
- مزایا: کاهش جریان راهاندازی (تقریباً به یک سوم جریان DOL)، کاهش شوک مکانیکی.
- معایب: گشتاور راهاندازی نیز کاهش مییابد (تقریباً یک سوم گشتاور DOL)، نیاز به موتور خاص با 6 سر سیم خارج شده و مدار کنترلی پیچیدهتر.
3.راهاندازی با سافت استارتر (Soft Starter)
- سافت استارتر یک دستگاه الکترونیک قدرت است که با کنترل تدریجی ولتاژ اعمالی به موتور، راهاندازی نرمی را فراهم میکند.
- نحوه کار: ولتاژ از صفر شروع میشود و در یک بازه زمانی مشخص (قابل تنظیم) به آرامی تا ولتاژ کامل افزایش مییابد.
- مزایا: راهاندازی بسیار نرم و بدون ضربه، کنترل دقیق جریان و گشتاور، کاهش استرس مکانیکی و الکتریکی.
- معایب: هزینه بالاتر نسبت به روشهای سنتی، تلفات حرارتی در سافت استارتر.
4.راهاندازی با درایو فرکانس متغیر (Variable Frequency Drive – VFD / Inverter)
پیشرفتهترین روش راهاندازی است که نه تنها ولتاژ، بلکه فرکانس برق اعمالی به موتور را نیز کنترل میکند.
- نحوه کار: VFD با راهاندازی موتور از فرکانس و ولتاژ بسیار پایین، امکان کنترل کامل سرعت و گشتاور را از لحظه سکون تا سرعت نامی فراهم میکند.
- مزایا: کنترل کامل بر فرآیند راهاندازی، گشتاور بالا در سرعتهای پایین، قابلیت تنظیم سرعت در حین کار، صرفهجویی در انرژی.
- معایب: بالاترین هزینه در بین روشهای ذکر شده.
5. راهاندازی با مقاومت اولیه یا اتوترانسفورماتور (فقط برای موتورهای قفسی بزرگ)
در این روشها، ولتاژ در ابتدا از طریق مقاومت یا ترانسفورماتور کاهش مییابد و پس از راهاندازی، اتصال مستقیم میشود. این روشها امروزه کمتر استفاده میشوند و جای خود را به سافت استارترها دادهاند.
6. راهاندازی موتورهای روتور سیمپیچیشده (اسلیپ رینگ)
همانطور که قبلاً ذکر شد، در این موتورها از مقاومتهای خارجی متغیر در مدار روتور استفاده میشود تا گشتاور راهاندازی افزایش یابد و جریان کاهش یابد. پس از راهاندازی، مقاومتها از مدار خارج میشوند.
تفاوت موتور القایی ( آسنکرون ) و موتور سنکرون
تفاوتهای موتور آسنکرون و سنکرون به شرح است:
| موتور آسنکرون (القایی) | موتور سنکرون | ویژگی |
| کمتر از سرعت سنکرون (وجود لغزش) | دقیقاً برابر سرعت سنکرون | سرعت روتور |
| بین ۰ تا ۱ | صفر | لغزش (Slip) |
| میدان روتور از استاتور القا میشود، بدون منبع خارجی | نیاز به منبع DC یا آهنربای دائم | تحریک روتور |
| معمولاً پسفاز | قابلیت کار در پیشفاز یا پسفاز | ضریب توان |
| بله، خود راهانداز | خیر، نیاز به مکانیسم کمکی | خود راهاندازی |
| قفس سنجابی یا سیمپیچ ساده | آهنربای دائم یا سیمپیچ DC | ساختار روتور |
| ارزانتر، نگهداری آسان، کاربرد گسترده در صنایع و ماشینآلات عمومی | راندمان بالاتر، کنترل دقیق سرعت، کاربرد در تولید برق و تجهیزات دقیق | راندمان و کاربرد |
جمع بندی
در این مقاله دیدیم که موتور آسنکرون چیست و چگونه با تکیه بر میدان مغناطیسی دوار استاتور و پدیده لغزش، گشتاور تولید میکند و چرا سرعت روتور آن همیشه کمی کمتر از سرعت سنکرون است. انواع اصلی این موتور یعنی روتور قفس سنجابی و روتور سیمپیچیشده (اسلیپرینگ) را معرفی کردیم، ساختار و نحوه کار هرکدام، مزایا و معایب و کاربردهایشان را بررسی نمودیم. سپس روشهای متداول راهاندازی مانند DOL، ستاره–مثلث، سافتاستارتر و راهاندازی با درایو فرکانس متغیر را مرور کردیم و دیدیم چگونه میتوان جریان هجومی و گشتاور راهاندازی را کنترل کرد. همچنین تفاوتهای کلیدی بین موتور سنکرون و موتور آسنکرون از نظر سرعت، لغزش، روش تحریک، ضریب توان و نوع کاربرد را مقایسه کردیم تا انتخاب بهینهتری در طراحی و بهرهبرداری داشته باشیم. شناخت این نکات کمک میکند در پروژههای صنعتی، موتور مناسب را با روش راهاندازی صحیح انتخاب کرده و هم بهرهوری انرژی و هم پایداری سیستم محرکه را بهبود دهیم.
سؤالات متداول درباره موتور آسنکرون
موتور آسنکرون چیست و چرا به آن موتور القایی میگویند؟
موتور آسنکرون یا Asynchronous motor موتوری است که سرعت روتور آن کمی کمتر از سرعت سنکرون میدان استاتور است. چون جریان روتور از طریق القای الکترومغناطیسی ایجاد میشود، به آن موتور القایی نیز گفته میشود.
انواع اصلی موتور آسنکرون کداماند؟
بهطور کلی از نظر نوع روتور به دو گروه تقسیم میشود: موتور آسنکرون با روتور قفس سنجابی و موتور آسنکرون با روتور سیمپیچیشده (اسلیپرینگ).
تفاوت روتور قفس سنجابی و روتور سیمپیچیشده چیست؟
در روتور قفس سنجابی، میلههای آلومینیومی یا مسی بهصورت اتصالکوتاه به حلقههای دو سر روتور متصلاند و امکان افزودن مقاومت خارجی وجود ندارد. در روتور سیمپیچیشده، سیمپیچ سهفاز از طریق حلقههای لغزنده به مدار خارجی وصل میشود و میتوان برای کنترل گشتاور راهاندازی و سرعت، مقاومت اضافه کرد.
چرا سرعت موتور آسنکرون همیشه کمتر از سرعت سنکرون است؟
برای القای ولتاژ در روتور باید اختلاف سرعتی بین میدان مغناطیسی استاتور و روتور وجود داشته باشد که به آن لغزش گفته میشود. همین لغزش سبب میشود سرعت موتور آسنکرون همیشه کمی کمتر از سرعت سنکرون باشد.
رایجترین روشهای راهاندازی موتور آسنکرون کداماند؟
برای موتورهای قفس سنجابی معمولاً از راهاندازی مستقیم روی خط (DOL)، ستاره–مثلث، سافتاستارتر و درایو فرکانس متغیر استفاده میشود. در موتورهای اسلیپرینگ نیز از مقاومت خارجی در مدار روتور برای افزایش گشتاور راهاندازی کمک میگیرند.
مهمترین کاربردهای موتور آسنکرون در صنعت چیست؟
بهدلیل سادگی و قیمت مناسب، در پمپها، فنها، کمپرسورها، نوار نقالهها، جرثقیلها و انواع ماشینآلات صنعتی و تأسیساتی استفاده میشود و در بسیاری از خطوط تولید منبع اصلی توان مکانیکی است.
مزایا و معایب موتور آسنکرون نسبت به سایر موتورها چیست؟
مزایا: ساختار ساده، هزینه اولیه پایین، راندمان مناسب و نیاز کم به نگهداری. معایب: جریان راهاندازی بالا، گشتاور شروع محدود در مدلهای قفسی و دشواری تنظیم سرعت بدون درایو فرکانس متغیر.
تفاوت موتور سنکرون و آسنکرون چه اثری در انتخاب دارد؟
موتور سنکرون با سرعت ثابت سنکرون و امکان اصلاح ضریب توان برای کاربردهای دقیق و توان بالا مناسب است. موتور آسنکرون انعطافپذیرتر و ارزانتر است و برای کاربردهای عمومی صنعتی رایجتر بوده و با افزودن درایو فرکانس متغیر، کنترل سرعت خوبی فراهم میکند.