
تفاوت سروو موتور با الکتروموتور سهفاز آسنکرون
در تفاوت سروو موتور با الکتروموتور سهفاز آسنکرون میتوان گفت موتور آسنکرون به عنوان یک راهکار استاندارد و صنعتی برای تامین توان پیوسته، از نظر سادگی ساخت، استحکام و قابلیت اطمینان بسیار شناخته شده است. در مقابل، سروو موتور به منظور اجرای حرکت های سریع، دقیق و کاملاً قابل کنترل طراحی شده و معمولاً در سیستم هایی به کار میرود که کنترل موقعیت، سرعت و گشتاور با دقت بالا اهمیت دارد. تفاوت این دو موتور صرفاً به ساختار مکانیکی محدود نمی شود، بلکه به طور مستقیم به فلسفه کنترل، میزان دقت قابل دستیابی، پاسخ دینامیکی سیستم و نوع کاربرد صنعتی آن ها مرتبط است.
در این مقاله از سایت تتا صنعت به بررسی تفاوت سروو موتور با الکتروموتور سهفاز آسنکرون می پردازیم.
ایده کلی و ساختار موتور آسنکرون سهفاز
الکتروموتور آسنکرون سهفاز از یک استاتور با سیمپیچهای سهفاز AC تشکیل شده است که از شبکه یا اینورتر تغذیه میشوند. روتور این موتور معمولاً از نوع قفس سنجابی است و از میلههای آلومینیومی یا مسی تشکیل میشود که در دو انتها اتصال کوتاه شدهاند.
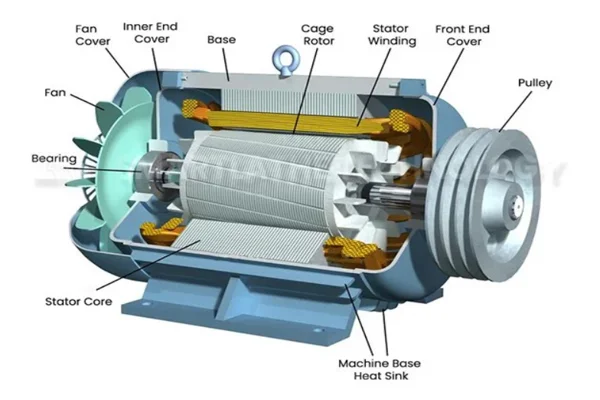
اصل تولید گشتاور در این موتور بر پایه القای الکترومغناطیسی است؛ به این معنا که میدان مغناطیسی دوّار استاتور در روتور جریان القا میکند و همین جریان باعث ایجاد گشتاور میشود. سرعت روتور همواره کمی کمتر از سرعت سنکرون است و این اختلاف سرعت که «لغزش» نام دارد، شرط لازم برای تولید گشتاور محسوب میشود. در حالت معمول، این موتور فیدبک داخلی ندارد و بهصورت حلقه باز کار میکند، مگر آنکه انکودر و درایو پیشرفته به آن افزوده شود.
ایده کلی و ساختار سروو موتور
سروو موتورهای صنعتی امروزی عمدتاً از نوع سنکرون با آهنربای دائم یا PMSM هستند. در این موتورها، روتور به آهنربای دائم، معمولاً از جنس نئودیمیوم، مجهز است که اینرسی کمی دارد و امکان شتاب گیری سریع را فراهم میکند.
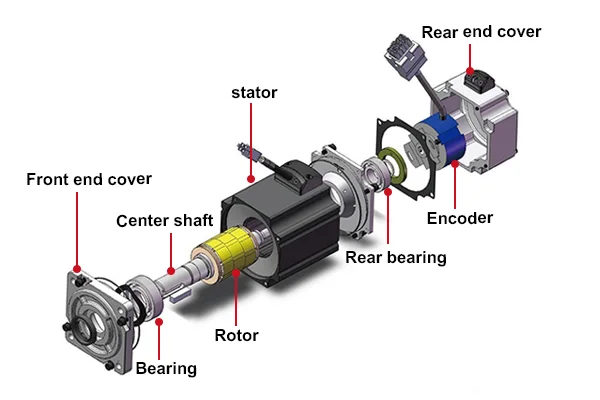
سروو موتور همواره همراه با یک سیستم فیدبک مانند انکودر افزایشی، مطلق یا رزولور و یک سروو درایو استفاده می شود. این مجموعه، حلقه های کنترلی جریان، سرعت و موقعیت را بهصورت همزمان می بندد. در نتیجه، سروو موتور از ابتدا به عنوان جزئی از یک سیستم کنترلی دقیق در نظر گرفته می شود و به صورت یک موتور مستقل به کار نمیرود.
فلسفه کنترل: حلقه باز در برابر حلقه بسته
در کاربردهای معمول، موتور آسنکرون به صورت حلقه باز کار می کند؛ یا مستقیماً به شبکه با فرکانس ثابت متصل است یا توسط اینورتر کنترل می شود که تنها ولتاژ و فرکانس را تغییر میدهد. این نوع کنترل ذاتاً برای موقعیت یابی دقیق مناسب نیست و دستیابی به دقت بالای سرعت یا گشتاور نیازمند کنترل برداری پیشرفته و اغلب استفاده از انکودر است.
در مقابل، سروو موتور همیشه در یک ساختار حلقه بسته کار میکند. سروو درایو بهطور مداوم فیدبک انکودر را با مقدار فرمان مقایسه کرده و در هر سیکل کنترلی ولتاژ و جریان را تنظیم میکند تا موقعیت، سرعت و گشتاور با کمترین خطا دنبال شوند. بهبیان ساده، موتور آسنکرون شبیه یک فن با پیچ تنظیم سرعت است، اما سروو موتور مانند محور یک دستگاه CNC عمل میکند که دقیقاً میداند در چه موقعیتی قرار دارد و باید به کجا حرکت کند.
عملکرد سرعت و گشتاور در موتور آسنکرون
موتور آسنکرون برای بارهایی با سرعت تقریباً ثابت، مانند پمپ ها، فن ها و نوار نقاله های ساده، بسیار مناسب است. گشتاور این موتور به لغزش وابسته بوده و در خارج از محدوده طراحی کاهش پیدا میکند. پاسخ موتور به تغییرات سرعت نسبتاً کندتر است، زیرا اینرسی روتور بالاتر بوده و ساختار کنترلی سادهتری دارد.
عملکرد سرعت و گشتاور در سروو موتور
سروو موتور بازه سرعت قابل کنترل بسیار وسیعی دارد و قادر است از صفر دور با گشتاور کامل تا سرعت نامی و حتی بالاتر در ناحیه تضعیف میدان بهصورت پایدار عمل کند. این موتورها قادر به تولید گشتاور لحظهای بالا، معمولاً 2 تا 3 برابر مقدار نامی برای مدت کوتاه هستند. پاسخ آنها بسیار سریع است و زمان پاسخ حلقه گشتاور معمولاً کمتر از 1 ms است. گشتاور در سروو موتور تقریباً به صورت خطی با جریان تغییر میکند و با دقت بالا کنترل میشود.
پاسخ دینامیکی و موقعیتیابی
یکی دیگر از تفاوت های سروو موتور با الکتروموتور سهفاز آسنکرون این است که در موتور آسنکرون، اینرسی بالاتر باعث میشود شتابگیری و توقف کندتر انجام شود. با استفاده از اینورتر برداری میتوان دقت مناسبی در کنترل سرعت موتور آسنکرون، در بازه حدود ±0.2 تا ±0.5%، بهدست آورد، اما موقعیتیابی دقیق بهطور ذاتی برای این موتور قابل تحقق نیست.
در سروو موتور، اینرسی کم موجب شروع و توقف بسیار سریع میشود. دقت موقعیتیابی بسیار بالاست و در سیستمهای پیشرفته حتی به کسری از یک درجه میرسد. به همین دلیل، سروو موتور گزینهای ایدهآل برای ایندکسینگ، هماهنگی چند محوره و حرکتهای پیچیده است. بهطور خلاصه، موتور آسنکرون دقت محدود و پاسخ کندتری دارد، در حالیکه سروو موتور بسیار سریع و بسیار دقیق است.
توان، راندمان و استحکام مکانیکی
یکی دیگر از تفاوت های سروو موتور با الکتروموتور سهفاز آسنکرون این است که از نظر توان نامی، موتورهای آسنکرون دامنهای از توانهای بسیار پایین تا چندین مگاوات دارند و در کاربردهای صنعتی بزرگ بهکار گرفته میشوند. سروو موتورها معمولاً در بازه چند ده وات تا چند ده کیلووات استفاده میشوند و به ندرت به توانهای بالاتر از حدود 100 kW میرسند.
راندمان موتورهای آسنکرون معمولاً در بازه 80 تا 90% قرار دارد و بخشی از تلفات آن به لغزش و گرمایش روتور مربوط میشود. در مقابل، سروو موتورها بهدلیل استفاده از آهنربای دائم و طراحی بهینه، راندمانی در حدود 90 تا 95% دارند.
از نظر استحکام مکانیکی، موتور آسنکرون بسیار مقاوم است و در برابر گردوغبار، لرزش و گرما مقاومت بالایی دارد . سروو موتورها نیز از نظر مکانیکی مناسب هستند، اما انکودر و کانکتورهای آنها حساستر بوده و به محافظت بیشتری نیاز دارند.
هزینه، پیچیدگی و انتخاب صحیح
سیستم مبتنی بر موتور آسنکرون هزینه اولیه پایینی دارد. راهاندازی آن میتواند بهصورت مستقیم، با سافتاستارتر یا با خرید اینورتر ساده انجام شود و تنظیمات آن نسبتاً ساده است. این گزینه زمانی بهترین انتخاب است که توان پیوسته اهمیت بیشتری از دقت داشته باشد و سادگی و هزینه پایین اولویت اصلی باشند.
در مقابل، سیستم سروو شامل موتور، درایو و انکودر است و هزینه آن بهمراتب بالاتر بوده و گاهی دو برابر یا بیشتر از سیستم آسنکرون تمام میشود. این سیستم نیازمند تنظیم دقیق حلقههای جریان، سرعت و موقعیت است. سروو زمانی بهترین انتخاب محسوب میشود که دقت بالا، استارت و استاپ سریع، تغییر جهت مداوم یا هماهنگی دقیق چند محور موردنیاز باشد.
جمع بندی نهایی
با بررسی تفاوت سروو موتور با الکتروموتور سهفاز آسنکرون یاد گرفتیم که الکتروموتور سه فاز آسنکرون انتخابی اقتصادی، مقاوم و مناسب برای کاربردهای پیوسته و ساده صنعتی است، در حالیکه سروو موتور برای کاربردهایی طراحی شده که دقت، سرعت پاسخ و کنترل موقعیت اهمیت حیاتی دارند. انتخاب بین این دو، نه بر اساس «بهتر بودن مطلق»، بلکه بر اساس نیاز واقعی فرآیند، سطح دقت مورد انتظار و بودجه پروژه انجام میشود.
سوالات متداول
آیا میتوان موتور آسنکرون را جایگزین سروو موتور کرد؟
در برخی کاربردهای ساده که دقت موقعیت یا پاسخ دینامیکی بسیار بالا اهمیت ندارد، میتوان از موتور آسنکرون بهجای سروو استفاده کرد. اما در کاربردهای دقیق مانند ماشینهای موقعیتیابی یا سیستمهای با پاسخ سریع، جایگزینی مستقیم معمولاً امکانپذیر نیست.
چرا سروو موتورها همیشه به انکودر نیاز دارند؟
در سروو سیستمها کنترل دقیق موقعیت، سرعت و گشتاور بر اساس فیدبک واقعی انجام میشود. این اطلاعات معمولاً توسط انکودر یا سنسور موقعیت از شفت موتور دریافت میشود و بدون آن دستیابی به دقت بالای سروو امکانپذیر نیست.
آیا موتور آسنکرون میتواند کنترل سرعت دقیق داشته باشد؟
با استفاده از اینورترهای برداری و در برخی موارد با فیدبک انکودر، موتور آسنکرون میتواند دقت سرعت خوبی ارائه دهد، اما معمولاً از نظر دقت موقعیت و پاسخ دینامیکی به سطح سروو موتور نمیرسد.
تفاوت اصلی هزینه در کجاست؟
در سیستمهای سروو، بخش مهمی از هزینه مربوط به خود موتور، سروو درایو و سیستم فیدبک مانند انکودر است. در مقابل، موتور آسنکرون ساختار سادهتری دارد و معمولاً با یک اینورتر عمومی قابل راهاندازی است، بنابراین هزینه کلی پایینتر است.
برای نوار نقاله یا پمپ کدام بهتر است؟
در اغلب کاربردهای نوار نقاله، فن یا پمپ که نیاز به کنترل بسیار دقیق موقعیت وجود ندارد، موتور آسنکرون انتخاب منطقیتر و اقتصادیتری است. استفاده از سروو معمولاً زمانی توجیه دارد که دقت سرعت بسیار بالا یا کنترل موقعیت ضروری باشد.