
قطع ایمن گشتاور STO در درایو چیست

اگر با اینورترها و فرایند های کنترل دور موتور سروکار داشته باشید، احتمالاً با این سؤال روبهرو شدهاید: چطور میتوانم مطمئن شوم موتور با وجود وصل بودن برق اصلی، ناگهان راه نمیافتد؟ پاسخ، استفاده از قطع ایمن گشتاور (STO) یا Safe Torque Off است. STO صرفاً یک فرمان کنترلی مثل Stop نیست بلکه یک عملکرد ایمنی است که برای جلوگیری از راهاندازی ناخواسته موتور طراحی شده است. در این مقاله، مفهوم STO را توضیح میدهیم و نکات عملی سیم بندیSTO را مرور میکنیم.
قطع ایمن گشتاور STO (Safe Torque Off) چیست؟
قطع ایمن گشتاور STO (Safe Torque Off) یک تابع ایمنی در درایو ( اینورتر ) است که با فعال شدن آن، درایو کاری میکند که موتور نتواند گشتاور تولید کند.
یعنی حتی اگر فرمان Run اشتباهاً صادر شود یا نویز و خطای نرم افزاری رخ دهد، خروجی قدرت درایو طوری غیرفعال میشود که موتور نتواند شتاب بگیرد یا به حرکت ادامه دهد.
عملکرد STO (Safe Torque Off)
STO باعث قطع گشتاور میشود به این معنی که مدارِ تولید پالسهای PWM برای المانهای قدرت (مثل (IGBT از کار میافتد و انرژی محرکه به موتور نمیرسد. در قطع ایمن گشتاور (STO) لزومی ندارد که برق اصلی درایو را قطع کنیم.
قطع ایمن گشتاور (STO) به دلیل عدم تولید گشتاور با وجود وصل بودن برق، کاربردهای بسیاری دارد. قطع ایمن گشتاور (STO)باعث میشود برق اصلی وصل بماند، ولی امکان راهاندازی ناخواسته وجود نداشته باشد.
در نظر داشته باشید که قطع ایمن گشتاور یاSTO به معنی ترمز سریع نیست. وقتی در یک درایو از قابلیت قطع ایمن گشتاور (STO) استفاده میشود، در واقع مسیر تولید گشتاور در خروجی اینورتر به صورت ایمن قطع میشود؛ یعنی درایو دیگر اجازه تولید جریان مؤثر برای ایجاد گشتاور در موتور را نمیدهد. اما یک نکته مهم این است که STO وظیفه ترمز کردن موتور را ندارد.
در درایوهایی مثل GD350A یا محصولاتی از Siemens و ABB، وقتی STO فعال میشود، خروجی PWM غیرفعال میشود و موتور عملاً بدون گشتاور رها میگردد. در این وضعیت اگر موتور در حال چرخش باشد، به دلیل اینرسی مکانیکی بار و روتور، به حرکت خود ادامه میدهد و به صورت طبیعی و تحت تأثیر اصطکاک و تلفات مکانیکی به تدریج متوقف میشود. بنابراین:
- اگر بار سبک باشد، توقف نسبتاً سریع اتفاق میافتد.
- اگر بار دارای اینرسی بالا باشد (مثلاً سانتریفیوژ، فن بزرگ یا سیستمی با جرم دورانی زیاد)، زمان توقف میتواند طولانی باشد.
اگر در صنعت توقف سریع یا کنترلشده لازم داریم، STO به تنهایی کافی نیست و باید از روشهای دیگر استفاده شود، مانند:
مدار ترمز دینامیکی (Brake Chopper + Resistor) که انرژی برگشتی موتور را در مقاومت ترمز تلف میکند و باعث کاهش سریع سرعت میشود.
همچنین میتوان از ترمز مکانیکی (Mechanical Brake) در موتورهای مجهز به ترمز الکترومغناطیسی استفاده نمود.( در این نوع ترمز، معمولاً یک دیسک یا صفحه اصطکاکی به محور موتور متصل است. وقتی ترمز فعال میشود، یک نیروی مکانیکی (اغلب توسط فنر) این صفحه را درگیر میکند و با ایجاد اصطکاک، شفت را قفل یا متوقف میکند.)
اهمیت و کاربردهای قطع ایمن گشتاور STO
در یک محیط صنعتی، همیشه خطر چرخش ناخواسته شفت وجود دارد. در ادامه مثال هایی از چرخش ناخواسته شفت و اهمیت و کاربرد قطع گشتاور ایمن میبینیم:
- اپراتور یا تعمیرکار در حال سرویس مکانیکی دستگاه است، اما کسی از اتاق کنترل فرمان Start میدهد.
- PLC یا شبکه صنعتی دچار خطا میشود و یک خروجی به اشتباه فعال میماند.
- نویز الکتریکی یا خطای سیم بندی باعث میشود ورودی Run فعال دیده شود.
قطع ایمن گشتاور STO برای اینگونه سناریو ها طراحی شده تا ریسک حرکت را به شکل قابل توجهی کاهش دهد.
تفاوت STO با Stop معمولی
Stop عادی معمولاً یک فرمان نرم افزاری است. ( Stop معمولی همان فرمان توقفی است که از طریق کیپد، PLC یا ورودی دیجیتال به درایو داده میشود.) در استاپ معمولی درایو فرکانس را کم میکند، رمپ میدهد و موتور را متوقف میکند. اما اگر کنترل داخلی مشکل پیدا کند، اگر PLC خطا دهد، یا اگر ورودی Run دوباره فعال شود، امکان برگشت حرکت وجود دارد. در مقابل، قطع ایمن گشتاور STO یک لایه ایمنی است که هدفش متوقف کردن گشتاوردهی است.
در Stop معمولی، IGBT های خروجی همچنان فعال هستند و درایو جریان را مدیریت میکند تا موتور نرم متوقف شود. در STO، درایو عملاً اجازه تحریک IGBT را نمیدهد؛ بنابراین تولید گشتاور غیرممکن میشود.
تفاوت STOبا قطع برق به وسیله کنتاکتور
قطع برق ورودی درایو با کنتاکتور، روش قدیمی و رایج است، اما مشکلات خودش را دارد:
- قطع و وصل مکرر برق ورودی میتواند استهلاک و تنش روی تجهیزات ایجاد کند.
- زمان برگشت به سرویس قبلی طولانیتر میشود. (برای مثال: شارژ باس DC ، راهاندازی مجدد و یا رفع خطاها)
- در بعضی کاربردها نمیخواهید کل درایو خاموش شود (مثلاً برای حفظ ارتباط، مانیتورینگ).
STO این مزیت را دارد که بدون خاموش کردن کامل درایو، باعث قطع گشتاور شود. با این حال، زمانی که تعمیرات حساس و جدی داریم، همچنان قطع برق اصلی بهترین گزینه است.
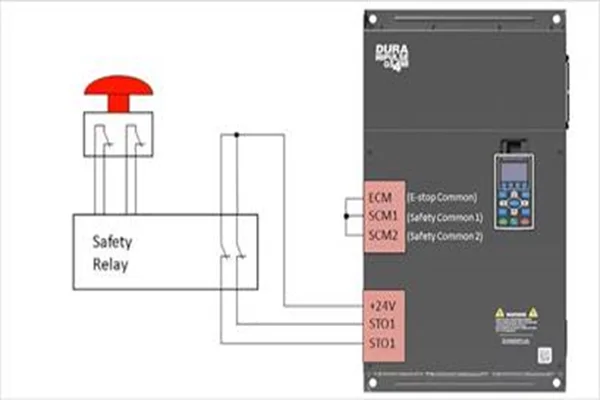
سیمبندی قطع ایمن گشتاور STO (Safe Torque Off)
سیمبندیSTO در اینورتر، در سادهترین حالت به این معنی است که، 24V را در یک مدار 2 کاناله به دو ورودی STO میدهید یا قطع میکنید تا درایو دیگر نتواند گشتاور بسازد. در سیم بندی با دو حالت عادی و ایمن روبرو هستیم که در ادامه آنها را بررسی میکنیم.
حالت عادی
روی بیشتر اینورترهای صنعتی دارای STO، دو ورودی مستقل وجود دارد که معمولاً با نامهای STO1 و STO2 شناخته میشوند. در برخی برندها با نامهایی مثل IN1/IN2 مشخص میشوند. این دو ورودی کاملاً جدا از هم طراحی شدهاند و ساختار دوکاناله (Dual Channel) دارند .بدلیل اینکه کنتاکت ها مستقل و دو کاناله هستند و اگر یک کنتاکت گیر کند، کانال دیگر ایمنی را حفظ میکند و خرابی سیم یا اتصال کوتاه تشخیص داده میشود از رله ایمنی استفاده میکنیم.
- هر دو ورودی STO باید فعال باشند.
- معمولاً با اتصال: +24V به هر دو ترمینال STO ، یا بسته بودن کنتاکت های رله ایمنی
در این حالت اینورتر اجازه راه اندازی موتور را می دهد. کنتاکت های STO دو کاناله و مستقل هستند. پس هر دو کانال STO باید مجزا و مستقل سیم بندی شوند.
حالت ایمن
وقتی STO فعال میشود، در واقع تغذیه ایمنی 24Vکه به ورودیهای STO (معمولاً دو کاناله) اعمال شده بود، قطع میشود. با حذف این ولتاژ، مدار ایمنی داخلی درایو بلافاصله مسیر فرماندهی به بخش توان را غیرفعال میکند. در این وضعیت:
- سیگنالهای PWM دیگر به گیت IGBTها اعمال نمیشوند.
- ترانزیستورهای خروجی درایو تحریک نمیشوند.
- جریان مؤثر به موتور ارسال نمیشود.
- در نتیجه موتور هیچ گشتاوری تولید نمیکند.
نکته بسیار مهم این است که عملکرد STO وابسته به نرمافزار، پارامترها یا CPU درایو نیست.
نتیجهگیری و جمعبندی
قطع ایمن گشتاور STO یا Safe Torque Off یکی از مهمترین قابلیتهای ایمنی در درایوهای صنعتی مدرن است. اگر بخواهیم در یک جمله خلاصه کنیم STO کاری میکند که موتور نتواند گشتاور تولید کند و به این ترتیب، ریسک راهاندازی ناخواسته را کاهش میدهد. برای رسیدن به این قابلیت باید سیمبندی صحیح که در مقاله توضیح داده شد؛ داشته باشیم.
سوالات متداول
وقتی STO فعال میشود موتور فوراً میایستد؟
معمولاً خیر. با فعال شدن STO تولید گشتاور متوقف میشود، اما موتور در بسیاری از کاربردها به دلیل اینرسی مکانیکی بهصورت آزاد متوقف میشود. برای توقف سریع و کنترلشده معمولاً از روشهای مکمل مانند SS1 یا ترمز مکانیکی استفاده میشود.
آیا STO برق ورودی درایو را قطع میکند؟
خیر. عملکرد STO به این صورت است که اجازه تولید گشتاور به درایو داده نمیشود، در حالی که ممکن است برق اصلی همچنان به درایو متصل باشد. این ویژگی یکی از مزیتهای مهم STO محسوب میشود، زیرا امکان توقف ایمن بدون قطع کامل تغذیه فراهم میشود.
چه چیزهایی باعث خطا در مدار STO میشود؟
سیمبندی اشتباه، شیلدینگ نامناسب یا نویز الکتریکی، طول زیاد کابل، همزمان نبودن تغییر وضعیت دو کانال ایمنی، خرابی رله یا سوئیچ ایمنی و همچنین مشکلات سختافزاری در مسیر ایمنی درایو از دلایل رایج بروز خطا در مدار STO هستند.
آیا STO برای محور عمودی (بالابر، آسانسور کوچک، وینچ) کافی است؟
معمولاً بهتنهایی کافی نیست. در محورهای عمودی خطر سقوط یا حرکت ناشی از وزن وجود دارد و در این شرایط معمولاً استفاده از ترمز مکانیکی و طراحی مناسب سیستم ایمنی در کنار STO ضروری است.