
معرفی مفهوم SVPWM
SVPWM را میتوان یک روش هوشمند دانست که در آن درایو با وجود استفاده از کلیدهای کاملاً روشن و خاموش، عملاً رفتاری شبیه تولید یک موج سینوسی سهفاز نرم از خود نشان میدهد. این کار از طریق ایجاد یک فلش چرخان یا همان بردار فضایی انجام میشود. در هر پریود PWM ، اینورتر با سرعت بسیار بالا بین چند جهت ثابت، اطراف این فلش جابهجا میشود تا میانگین ولتاژی که موتور دریافت میکند، معادل یک موج سینوسی تمیز باشد.
در این مقاله از سایت تتا صنعت یاد میگیریم که SVPWM چیست و دقیقا چه کاری انجام میدهد.
SVPWM دقیقاً چه کاری انجام میدهد؟
از لحاظ سخت افزاری در داخل یک اینورتر یا VFD ، یک باس DC وجود دارد که میتوان آن را مشابه یک منبع ولتاژ ثابت در نظر گرفت. این باس DC به یک اینورتر سه فاز متصل است که از شش کلید قدرت (IGBT) تشکیل شده و برای هر فاز یک کلید بالا و یک کلید پایین دارد. از دید سختافزاری، هر فاز موتور فقط میتواند به مثبت باس DC، منفی باس DC یا در برخی الگوها در حالت خنثی یا شناور متصل شود.
 در حالی که موتور برای عملکرد نرم و بدون لرزش به یک موج سینوسی سهفاز نیاز دارد، اینورتر تنها قادر است ولتاژ DC را با سرعت بالا روشن و خاموش کند. در پاسخ به اینکه SVPWM چیست میتوان گفت که SVPWM، الگوریتمی است که مشخص میکند هر IGBT در چه لحظهای روشن یا خاموش شود تا در هر بازه بسیار کوتاه کلیدزنی، میانگین ولتاژ دیدهشده توسط موتور شبیه یک بردار سینوسی چرخان و تمیز باشد. نتیجه این روش، استفاده بهینهتر از ولتاژ باس DC و کاهش اعوجاج جریان و ریپل گشتاور است.
در حالی که موتور برای عملکرد نرم و بدون لرزش به یک موج سینوسی سهفاز نیاز دارد، اینورتر تنها قادر است ولتاژ DC را با سرعت بالا روشن و خاموش کند. در پاسخ به اینکه SVPWM چیست میتوان گفت که SVPWM، الگوریتمی است که مشخص میکند هر IGBT در چه لحظهای روشن یا خاموش شود تا در هر بازه بسیار کوتاه کلیدزنی، میانگین ولتاژ دیدهشده توسط موتور شبیه یک بردار سینوسی چرخان و تمیز باشد. نتیجه این روش، استفاده بهینهتر از ولتاژ باس DC و کاهش اعوجاج جریان و ریپل گشتاور است.
مفهوم بردار فضایی یا فلش چرخان
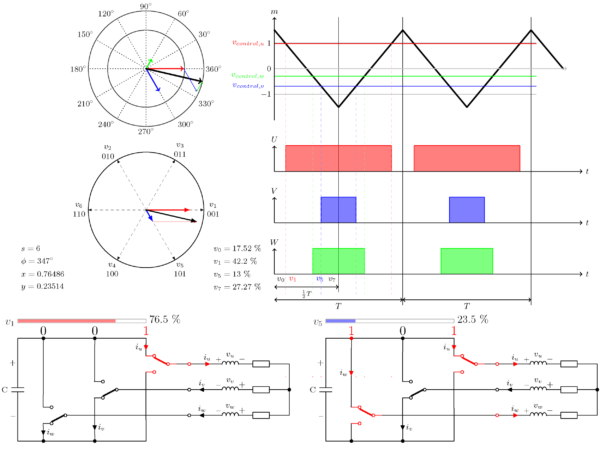
سه ولتاژ فاز A، B و C را میتوان بهصورت یک بردار دوبعدی در صفحه در نظر گرفت. این بردار دارای طول است که بیانگر اندازه ولتاژ بوده و زاویهای دارد که متناظر با زاویه الکتریکی است. در یک سیستم سهفاز سینوسی ایدهآل، این بردار باید با سرعت زاویهای ثابت بچرخد و طول آن نیز ثابت باقی بماند.
بنابراین وظیفه SVPWM در هر پریود PWM این است که تشخیص دهد در این لحظه، بردار مرجع با چه طول و زاویهای مورد نیاز است و با چه وضعیتهای کلیدزنی و چه مدتزمانی باید اعمال شوند تا میانگین بردار دقیقاً همان بردار مرجع شود.
هشت حالت کلیدزنی و شش ضلعی ولتاژ
با توجه به اینکه هر فاز دو حالت بالا یا پایین دارد، در مجموع هشت حالت کلیدزنی ممکن است. شش حالت از این هشت حالت، ولتاژ خط به خط غیرصفر ایجاد میکنند و بهعنوان بردارهای فعال شناخته میشوند، در حالی که دو حالت باقیمانده ولتاژ خط به خط صفر تولید میکنند و بردار صفر نام دارند.در جدول زیر این هشت حالت نوشته شده است.
نام | C | B | A | حالت |
| بردار صفر | 0 | 0 | 0 | 000 |
| بردار فعال | 1 | 0 | 0 | 001 |
بردار فعال | 0 | 1 | 0 | 010 |
| بردار فعال | 1 | 1 | 0 | 011 |
| بردار فعال | 0 | 0 | 1 | 100 |
| بردار فعال | 1 | 0 | 1 | 101 |
| بردار فعال | 0 | 1 | 1 | 110 |
| بردار صفر | 1 | 1 | 1 | 111 |
اگر شش بردار فعال را بهصورت سر به ته رسم کنیم، یک ششضلعی بهدست میآید. بردار مرجع یا ولتاژ مطلوب همواره داخل این ششضلعی قرار دارد و در هر لحظه بین دو بردار فعال مجاور واقع میشود. به همین دلیل، SVPWM در هر لحظه فقط از دو بردار فعال نزدیک و یک بردار صفر استفاده میکند.
عملکرد SVPWM در یک پریود کلیدزنی
در هر پریود کلیدزنی، SVPWM با تعیین موقعیت بردار مرجع، دو بردار فعال مجاور و یک بردار صفر را انتخاب میکند و آنها را برای زمانهای دقیق اعمال میکند تا میانگین ولتاژ خروجی دقیقاً معادل ولتاژ مطلوب باشد. نتیجه این زمانبندی هوشمندانه، تولید یک بردار ولتاژ چرخان نرم است که موتور آن را بهصورت یک موج سینوسی پیوسته حس میکند.
انتخاب سکتور و بردارهای مجاور
در هر پریود PWM ، الگوریتم کنترل ابتدا بردار مرجع را با زاویه و اندازه مشخص تولید میکند. سپس ششضلعی به شش سکتور تقسیم میشود و مشخص میگردد بردار مرجع در کدام سکتور قرار دارد. فرض کنید این بردار بین دو بردار فعال V₁ و V₂ باشد. در این پریود فقط همین دو بردار فعال بههمراه یک بردار صفر مورد استفاده قرار میگیرند.
محاسبه زمان اعمال هر بردار
در طول یک پریود کلیدزنی، بردار V₁ به مدت T₁، بردار V₂ به مدت T₂ و بردار صفر به مدت T₀ اعمال میشود. این زمانها بهگونهای انتخاب میشوند که میانگین زمانی ولتاژ دقیقاً برابر بردار مرجع باشد و مجموع آنها برابر با کل پریود کلیدزنی شود. این محاسبات بهصورت کامل داخل الگوریتم SVPWM انجام میشوند و نیازی به دخالت کاربر ندارند.
الگوی متقارن کلیدزنی
برای کاهش اعوجاج و حذف هارمونیکهای فرکانس پایین، SVPWM از یک الگوی متقارن در هر پریود PWM استفاده میکند. معمولاً پریود با نصف زمان بردار صفر آغاز میشود، سپس بردار فعال اول و بعد بردار فعال دوم اعمال میگردد و در ادامه همین توالی بهصورت قرینه تکرار میشود تا دوباره به بردار صفر برسیم. این تقارن باعث بهبود کیفیت ولتاژ و جریان خروجی میشود.
موتور خروجی SVPWM را چگونه میبیند؟
سیمپیچهای موتور قادر به دنبال کردن تغییرات بسیار سریع کلیدزنی نیستند، زیرا ثابت زمانی الکتریکی موتور بسیار بزرگتر از پریود PWM است. در نتیجه موتور عملاً میانگین ولتاژ اعمالشده را حس میکند. به همین دلیل، با وجود اینکه خروجی اینورتر بین چند بردار گسسته تغییر میکند، موتور یک بردار چرخان نرم و پیوسته را تجربه میکند که بسیار نزدیک به بردار مرجع است.
برتری SVPWM نسبت به PWM سینوسی ساده چیست
SVPWM نسبت به PWM سینوسی ساده از ولتاژ باس DC بهصورت بهینهتری استفاده میکند و امکان دستیابی به ولتاژ مؤثر و سرعت پایه بالاتر موتور را فراهم میسازد. همچنین بهدلیل انتخاب هوشمندانه بردارها و الگوی کلیدزنی متقارن، اعوجاج جریان، ریپل گشتاور و نویز صوتی موتور بهطور محسوسی کاهش مییابد.در ادامه این برتری ها را جداگانه توضیح میدهیم.
استفاده بهتر از ولتاژ باس DC
در PWM سینوسی سهفاز ساده، بیشترین ولتاژ مؤثر خط به خط حدود 0.577 برابر ولتاژ باس DC است. در مقابل، SVPWM میتواند این مقدار را به حدود 0.637 برابر ولتاژ باس DC برساند که معادل حدود 15 درصد افزایش است. این موضوع امکان دستیابی به ولتاژ و سرعت پایه بالاتر موتور را قبل از ورود به ناحیه تضعیف میدان فراهم میکند.
اعوجاج کمتر و گشتاور نرمتر
SVPWM همواره دو بردار فعال نزدیک به بردار مرجع را انتخاب کرده و از توالی متقارن و زمانبندی مناسب بردار صفر استفاده میکند. نتیجه این روش، کاهش اعوجاج جریان، کاهش ریپل گشتاور و کاهش نویز صوتی نسبت به PWM سینوسی ساده است. در عمل، موتور نرمتر کار کرده و برای همان توان، خنکتر باقی میماند.
پیادهسازی SVPWM در یک درایو واقعی (مثال GD350A)
در یک درایو واقعی مانند GD350A، پارامتر P00.00 = 2 یعنی حالت کنترل بردار ولتاژ فضایی که همان SVPWM به همراه کنترل V/f است. این حالت زمانی استفاده میشود که دقت بسیار بالا مورد نیاز نباشد یا زمانی که چند موتور با یک درایو و منحنی V/f راهاندازی میشوند.
درایو امکان انتخاب نوع منحنی V/f، زمانهای شتاب و کاهش، محدودیتهای ولتاژ، بوست گشتاور و سایر پارامترها را فراهم میکند تا رفتار کلی سیستم شکل داده شود. در این ساختار، بخش بردار فضایی همان SVPWM است که ولتاژهای سهفاز تمیز تولید میکند و بخش V/f و جبرانها تعیین میکنند بردار مرجع در هر لحظه چه باشد. کاربر مستقیماً با بردارها یا زمانهای کلیدزنی سروکار ندارد و فقط پارامترهای کنترلی را تنظیم میکند.
دیاگرامهای ذهنی برای درک بهتر SVPWM
برای درک شهودی، میتوان یک ششضلعی در نظر گرفت که شش بردار فعال از مرکز به سمت رأسها کشیده شدهاند و بردار مرجع همیشه داخل این ششضلعی و بین دو بردار مجاور قرار دارد. همچنین یک پریود PWM را میتوان بهصورت یک محور زمان تصور کرد که ابتدا با بردار صفر شروع میشود، سپس دو بردار فعال اعمال میشوند و در ادامه همین مسیر بهصورت قرینه بازمیگردد. مساحت زمانی این قطعات دقیقاً معادل یک بردار یکنواخت مطلوب در کل پریود است.
جمعبندی نهایی SVPWM
این مقاله آموختیم که SVPWM چیست و دقیقا چه کاری انجام میدهد ، SVPWM یک روش مدولاسیون پیشرفته است که با استفاده از کلیدزنیهای سریع و هوشمندانه، امکان تولید ولتاژ سهفاز نرم، استفاده بهینه از باس DC و کاهش اعوجاج جریان و گشتاور را فراهم میکند. این روش پایه بسیاری از درایوهای مدرن بوده و نقش کلیدی در بهبود عملکرد، راندمان و نرمی حرکت موتورهای الکتریکی دارد.
سوالات متداول
آیا SVPWM باعث افزایش تنش روی کلیدهای قدرت میشود؟
خیر. روش SVPWM صرفاً الگوی کلیدزنی را بهینه میکند و بهطور معمول تنش غیرعادی به المانهای قدرت مانند IGBT وارد نمیکند. هدف این روش استفاده مؤثرتر از ولتاژ باس DC و بهبود کیفیت موج خروجی است.
تفاوت اصلی SVPWM با PWM سینوسی چیست؟
تفاوت اصلی در این است که SVPWM استفاده بهینهتری از ولتاژ باس DC انجام میدهد و معمولاً اعوجاج جریان و گشتاور را نسبت به روش Sinusoidal PWM کاهش میدهد، که به عملکرد نرمتر موتور منجر میشود.
آیا SVPWM فقط در کنترل برداری استفاده میشود؟
خیر. SVPWM علاوه بر کنترل برداری، میتواند در حالتهای کنترلی دیگر مانند V/f نیز بهعنوان روش مدولاسیون ولتاژ مورد استفاده قرار گیرد و محدود به یک روش کنترلی خاص نیست.
آیا کاربر باید تنظیمات پیچیده SVPWM را انجام دهد؟
خیر. تمام محاسبات مربوط به SVPWM بهصورت داخلی در درایو انجام میشود و کاربر معمولاً فقط حالت کنترلی، پارامترهای پایه موتور و تنظیمات کلی را انتخاب میکند.
آیا SVPWM برای همه کاربردها مناسب است؟
در اغلب کاربردهای صنعتی مدرن، SVPWM یکی از بهترین گزینهها محسوب میشود، بهویژه زمانی که راندمان بالا، حرکت نرم موتور و استفاده بهینه از ولتاژ اهمیت داشته باشد.