
موتور سنکرون چیست
موتورهای سنکرون نوعی از موتورهای الکتریکی هستند که در آن روتور با همان سرعت میدان مغناطیسی دوار استاتور میچرخد(Nrotor = Ns)، این موتورها به دلیل دقت بالا و سرعت ثابت، در کاربردهایی که نیاز به کنترل دقیق سرعت دارند، مانند ژنراتورها، ماشینآلات دقیق صنعتی و سیستمهای محرکه حساس استفاده میشوند .
فرمول سرعت سنکرون (Ns)
سرعت سنکرون (Ns) که یک مقدار ثابت و وابسته به شبکه است،توسط فرکانس سیستم تغذیه و تعداد قطب های طراحی شده در موتور تعیین می شود و با فرمول زیر محاسبه می شود:
Ns = 120f/p
- Ns: سرعت استاتور( برحسب دور در دقیقه RPM)
- f : فرکانس تامین (بر حسب هرتز) در ایران معمولاً ۵۰ هرتز است.
- p : تعداد قطب های موتور
مثال: یک موتور 2 قطبی در شبکه ۵۰ هرتز (استاندارد ایران) با سرعت زیر می چرخد:
NS=(120*50)/2=3000RPM
ساختار موتور سنکرون
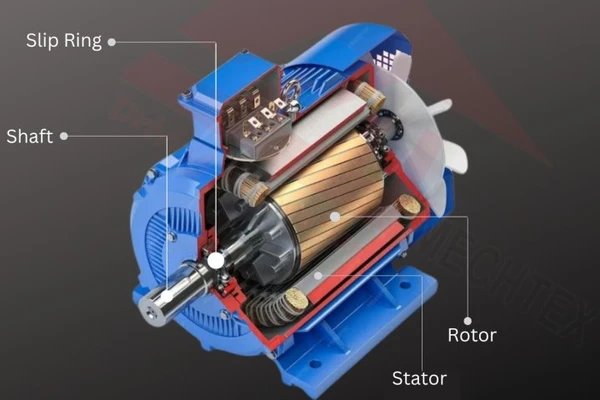
موتور سنکرون از دو بخش اصلی استاتور و روتور تشکیل شده است.
۱. استاتور (Stator)
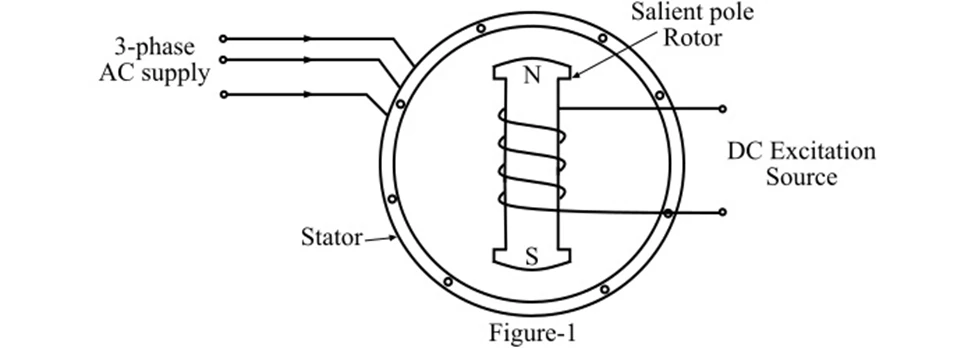
استاتور بخش ثابت موتور است که حاوی سیم پیچ های سه فاز است. با اعمال ولتاژ سه فاز AC به این سیم پیچ ها، یک میدان مغناطیسی دوار (RMF) با سرعتی برابر باNs در شکاف هوایی موتور تولید می شود.
۲. روتور (Rotor)
روتور بخش متحرک موتور است که می تواند از دو نوع اصلی باشد:
- قطب برجسته (Salient Pole): در موتورهای با سرعت پایین و تعداد قطب زیاد.
- استوانه ای (Non-Salient Pole / Cylindrical): در موتورهای با سرعت بالا (مانند توربو ژنراتورها).
برخلاف موتور آسنکرون، روتور موتور سنکرون نیاز به منبع تغذیه جریان مستقیم (DC) دارد. این جریان از طریق حلقه های لغزش (Slip Rings) و جاروبک ها به سیم پیچ های میدان روتور اعمال می شود تا روتور به یک آهنربای الکتریکی قدرتمند با قطب های ثابت (N و S) تبدیل شود. (برای شناخت بهتر آسنکرون مقاله موتور آسنکرون چیست را مطالعه کنید)
اعمال دو منبع الکتریکی (AC به استاتور و DC به روتور)، موتور سنکرون را به یک “ماشین با تحریک مضاعف ” تبدیل می کند.
عملکرد و تعامل استاتور و روتور
هنگامی که جریان AC از سیمپیچهای استاتور عبور میکند، یک میدان مغناطیسی دوار داخل موتور ایجاد میشود. روتور، که دارای میدان مغناطیسی ثابت است، در این میدان مغناطیسی دوار قرار میگیرد. تعامل بین میدان مغناطیسی دوار استاتور و میدان مغناطیسی ثابت روتور باعث ایجاد یک قفل مغناطیسی میشود که موجب میشود روتور با همان سرعت میدان مغناطیسی دوار بچرخد. این هماهنگی کامل بین سرعت روتور و سرعت میدان مغناطیسی دوار، ویژگی اصلی موتورهای سنکرون است و هیچ لغزشی بین این دو وجود ندارد.
این ویژگی باعث میشود که موتورهای سنکرون برای کاربردهایی که نیاز به سرعت ثابت و دقت بالا دارند، بسیار مناسب باشند.
کاربرد های موتور سنکرون :
در ژنراتورهای برق، ماشینآلات دقیق صنعتی، پمپها و کمپرسورها، و سیستمهای حمل و نقل که نیاز به کنترل دقیق و پایداری سرعت دارند، از موتورهای سنکرون استفاده میشود.
روش های راه اندازی موتور سنکرون
در ادامه به رایجترین روشهای راهاندازی موتور سنکرون، مزایا و معایب آنها می پردازیم.

1) راهاندازی با موتور کمکی (Prime Mover)
در این روش یک موتور دیگر (معمولاً آسنکرون یا موتور DC) روتور را تا سرعت سنکرون میچرخاند، سپس تحریک DC وصل شده و موتور وارد حالت سنکرون میشود.
مزایا: ساده، پایدار
معایب: نیاز به یک موتور اضافی
2) راهاندازی با سیمپیچ دمپر (Damper Winding / Cages)
در این روش روی روتور قفس دمپر قرار داده میشود تا موتور مانند یک موتور القایی راهاندازی شود.وقتی به سرعت نزدیک سنکرون رسید، جریان DC به سیمپیچ میدان اعمال شده و موتور سنکرون میشود.این روش معمولا در ژنراتورها و موتورهای سنکرون کوچک و متوسط بکار می رود.
3) راهاندازی با استفاده از مبدل فرکانس (VFD / Soft Starter)
با کاهش تدریجی فرکانس و ولتاژ، موتور آرامآرام شتاب میگیرد تا به سرعت سنکرون برسد.سپس تحریک DC وصل میشود.
معایب: هزینه بالا
مزایا:
- جریان راهاندازی کم
- کنترل سرعت
- امکان راهاندازی موتورهای سنکرون بدون دمپر
4) راهاندازی به روش “پلهای” (Starting by Frequency Changing)
مشابه VFD ولی با سیستمهای الکترونیک قدرت قدیمیتر که فرکانس، پلهپله افزایش داده میشود.
5) راهاندازی با توربین یا محرک خارجی (برای ژنراتور سنکرون)
در نیروگاهها روتور توسط توربین (گاز، بخار، آبی) به سرعت سنکرون میرسد،سپس پس از همترازی سرعت روتور و میدان مغناطیسی استاتور، تحریک اعمال میشود.
6) راهاندازی با موتور القایی کمکی داخل روتور (Induction Start Synchronous Motor)
در برخی مدلها روتور دارای دو بخش است:
- بخش القایی برای راهاندازی
- بخش سنکرون برای کار در حالت نهایی
پس از رسیدن به سرعت سنکرون بخش القایی از مدار خارج میشود.
تفاوت موتور سنکرون و موتور القایی ( آ سنکرون )
تفاوتهای موتور سنکرون و آسنکرون به شرح است:
موتور آسنکرون (القایی) | موتور سنکرون | ویژگی |
| کمتر از سرعت سنکرون (وجود لغزش) | دقیقاً برابر سرعت سنکرون | سرعت روتور |
بین ۰ تا ۱ | صفر | لغزش (Slip) |
| میدان روتور از استاتور القا میشود، بدون منبع خارجی | نیاز به منبع DC یا آهنربای دائم | تحریک روتور |
معمولاً پسفاز | قابلیت کار در پیشفاز یا پسفاز | ضریب توان |
| بله، خود راهانداز | خیر، نیاز به مکانیسم کمکی | خود راهاندازی |
قفس سنجابی یا سیمپیچ ساده | آهنربای دائم یا سیمپیچ DC | ساختار روتور |
| ارزانتر، نگهداری آسان، کاربرد گسترده در صنایع و ماشینآلات عمومی | راندمان بالاتر، کنترل دقیق سرعت، کاربرد در تولید برق و تجهیزات دقیق | راندمان و کاربرد |
جمع بندی نهایی
در این مقاله متوجه شدیم که موتور سنکرون نوعی موتور الکتریکی است که روتور آن با سرعت میدان مغناطیسی استاتور میچرخد و هیچ لغزشی ندارد.سرعت سنکرون این موتور به فرکانس تغذیه و تعداد قطبها وابسته است و روتور آن نیاز به تحریک DC دارد. روشهای راهاندازی موتور سنکرون شامل موتور کمکی، سیمپیچ دمپر و مبدل فرکانس است. در مقایسه با موتور آسنکرون، موتور سنکرون راندمان بالاتر، کنترل دقیق سرعت و مناسب برای ماشینآلات حساس را ارائه میدهد.
سوالات متداول درباره موتور سنکرون
1️⃣ موتور سنکرون چیست و چه تفاوتی با ماشین سنکرون دارد؟
موتور سنکرون نوعی ماشین الکتریکی است که در آن سرعت روتور دقیقا برابر سرعت میدان مغناطیسی دوار استاتور است و لغزش صفر است. «ماشین سنکرون» اصطلاح کلیتری است که هم حالت موتوری و هم حالت ژنراتوری این تجهیز را شامل میشود.
2️⃣ سرعت سنکرون در موتور سنکرون چگونه محاسبه میشود؟
سرعت سنکرون با رابطه Ns = 120f / p محاسبه میشود؛ Ns سرعت برحسب دور بر دقیقه، f فرکانس شبکه برحسب هرتز و p تعداد قطبهای موتور است. مثلا یک موتور دو قطب روی شبکه 50Hz حدود 3000RPM سرعت دارد.
3️⃣ چرا در موتور سنکرون لغزش وجود ندارد؟
چون روتور با کمک تحریک DC به یک آهنربای الکتریکی تبدیل میشود و با میدان مغناطیسی دوار استاتور قفل مغناطیسی برقرار میکند. در نتیجه سرعت روتور دقیقا برابر سرعت میدان میشود و لغزش عملاً صفر است.
4️⃣ استاتور و روتور در موتور سنکرون چه ساختاری دارند؟
استاتور شامل هسته شیاردار و سیمپیچ سهفاز است که میدان مغناطیسی دوار تولید میکند. روتور میتواند قطب برجسته برای سرعتهای پایین یا استوانهای برای سرعتهای بالا باشد و روی آن سیمپیچ میدان DC و در بسیاری از موارد سیمپیچ دمپر قرار میگیرد.
5️⃣ چرا روتور موتور سنکرون به تحریک DC نیاز دارد؟
برای اینکه روتور یک میدان مغناطیسی ثابت، پایدار و قابلکنترل داشته باشد تا بتواند با میدان دوار استاتور همسرعت شود. این میدان ثابت با اعمال جریان مستقیم به سیمپیچ روتور از طریق رینگ لغزان و جاروبک یا سیستمهای بدون جاروبک تأمین میشود.
6️⃣ مهمترین روشهای راهاندازی موتور سنکرون کداماند؟
از روشهای رایج میتوان به راهاندازی با موتور کمکی، استفاده از سیمپیچ دمپر روی روتور، بهکارگیری مبدل فرکانس (VFD)، روش پلهای تغییر فرکانس و در ژنراتورهای سنکرون، استفاده از توربین به عنوان محرک اولیه اشاره کرد. در برخی مدلها یک بخش القایی داخل روتور هم برای راهاندازی استفاده میشود.
7️⃣ تفاوت اصلی موتور سنکرون و موتور القایی (آسنکرون) چیست؟
در موتور القایی سرعت روتور کمی کمتر از سرعت سنکرون است و میدان روتور از استاتور القا میشود، پس لغزش غیرصفر است. در موتور سنکرون، روتور با تحریک DC یا آهنربای دائم تغذیه میشود، با سرعت سنکرون میچرخد و میتواند با ضریب توان پسفاز یا حتی پیشفاز کار کند.
8️⃣ کاربردهای اصلی موتور سنکرون در صنعت چیست؟
موتور سنکرون در ژنراتورهای سنکرون، ماشینآلات دقیق صنعتی، پمپها و کمپرسورهای بزرگ، سیستمهای حملونقل و درایوهایی که نیاز به سرعت کاملاً ثابت و ضریب توان قابلتنظیم دارند بهکار میرود و بهدلیل راندمان بالا و پایداری سرعت، برای فرآیندهای حساس انتخاب میشود.